Selleks, et mõista, millised mehaanilised uuringud on vaja kaaluda, milliseid liikumisvahendeid kõige üldisemas mõttes. Selle sõna väärtus tähendab muutust midagi. Näiteks pooldab poliitiline liikumine elanikkonna erinevate kihtide võrdsust, olenemata nende rassilisest kuuluvusest. Varem ei olnud see midagi muutunud ja nüüd on igal inimesel võrdsed õigused. See on tsivilisatsiooni liikumine ees. Teine näide on keskkonna. Varem valides looduses, keegi ei mõelnud, mis jätab prügi peale ise. Täna kogub iga tsiviliseeritud isik temaga koos temaga ja võtab selle spetsiaalselt määratud kohas edasiseks kõrvaldamiseks.
Midagi sellist võib täheldada mehaanika. Mehaanilise liikumise korral muutub keha asend kosmoses teiste esemete suhtes aja jooksul. Mehaanika peamine ülesanne on näidata, kus objekt on igal ajal, arvestades isegi seda, kes pole veel tulnud. See tähendab, et ennustada keha positsiooni kindlaksmääratud aja jooksul, mitte ainult selleks, et teada saada, kus see oli minevikus.
Kinemaatika on osa mehaanika, mis uurib keha liikumist ilma selle põhjuste analüüsimata. See tähendab, et ta õpetab mitte seletada, vaid kirjeldab. See tähendab, et tulla viis, kuidas oleks võimalik määrata keha positsiooni igal ajal. Kinemaatika põhikontseptsioonid hõlmavad kiirust, kiirendust, kaugus, aega ja liikumist.
Raskusi liikumise kirjelduses
Esimene probleem, millega kinemaatika nägu on, et igal kehal on teatud suurus. Oletame, et on vaja kirjeldada mõne objekti liikumist. See tähendab, kuidas õppida oma positsiooni määrata igal ajal. Kuid iga toode võtab ruumi ruumi. See tähendab, et kõik selle objekti osad samas kohastes ajahetkel hõivata erineva positsiooni.

Millises mõttes tuleb sellisel juhul võtta kogu teema asukoha kirjeldamiseks? Kui kaalute iga, siis arvutused on liiga keerulised. Seetõttu saab sellele küsimusele vastata otsust hõlpsasti lihtsustada. Kui kõik ühe keha punktid liiguvad samas suunas, piisab selle keha liikumise kirjeldamiseks.
Kinemaatika liikumise liigid
On kolm tüüpi:
- Seal on progressiivne liikumine, kus igasugune otsene kulutatud keha jääb paralleelselt iseenesest. Näiteks auto, mis liigub maanteel, selline tüüpi liikumine.
- Pööravat nimetatakse sellise keha liikumist, kus kõik selle punktid liiguvad ringi ümber ühe sirgjoonega, mida nimetatakse pöörlemise teljele. Näiteks maapöördumine maa suhtes oma telje suhtes.
- Võistlusel on liikumine, milles keha kordab selle trajektoori teatud aja jooksul. Näiteks pendeli liikumine.
Kinemaatika põhikontseptsioonid - materjalipunkt
Iga keerulist liikumist saab kirjeldada kahe lihtsa liigi kombinatsioonina - progresseeruva ja pöörlemise kombinatsioon. Näiteks sõiduki ratta või Yula, kes seisab otse liikuva otse, osaleda üheaegselt nendes kahes liiki liikumisliikumise.

Aga mis siis, kui keha liikumist ei saa esitada kombinatsioonina? Näiteks, kui auto sõidab kukkude tee, muutub selle positsioon väga keeruliseks. Kui te arvutate ainult asjaolu, et see transport liigub ühest linnast teise, siis sellises olukorras ei ole see oluline, millises suuruses keha liigub punktist a punkti B-le ja neid saab tähelepanuta jätta. Sellisel juhul on oluline ainult selleks, millisel ajal auto läbis teatud vahemaa ja millisel kiirusel liikusid.
Siiski tuleb meeles pidada, et igas ülesandes ei ole suurust tähelepanuta jätmine lubatud. Näiteks kui arvutate auto parkimise liikumise, siis selle keha ulatuse ignoreerimine toob kaasa kahjuliku tagajärgi. Seetõttu ainult nendes olukordades, kus konkreetse ülesande piires on liikuva objekti mõõtmed tähelepanuta jäetud, seejärel nimetatakse sellist keha materjalipunkti.
Valemite kinemaatika
Numbrid, millega punkti asendisse pannakse kosmosesse, nimetatakse koordinaatideks. Selle määramiseks sirgjoonel, vaid üks number, kui tegemist on pinnaga, siis kaks ruumi umbes kolm. Veel kolmemõõtmelise maailma numbreid (materjalipunkti positsiooni kirjeldamiseks) ei ole vajalik.

Kinemaatika kontseptsioonile on kolm põhivõrrandit kui TEL:
- v \u003d U + at.
- S \u003d UT + 1 / 2at 2.
- v2 \u003d U 2 + 2A.
v \u003d lõplik kiirus,
u \u003d esialgne kiirus
a \u003d kiirendus
s \u003d keha vaheline kaugus
Kinemaatika valemid ühemõõtmelises ruumis:
X - X O \u003d V O T + 1 / 2A T2
V2 \u003d V O 1 + 2A (x - x o)
X - x o \u003d 1 2 (V O + V) t
Kus,
V - lõplik kiirus (m / s), \\ t
V O - esialgne kiirus (m / s), \\ t
a - kiirendus (m / s 2), \\ t
t - aeg (id),
X - lõplik positsioon (m), \\ t
Kinemaatika valemid kahemõõtmelises ruumis
Kuna tasapinna materjalipunkti kirjeldamiseks kasutatakse järgmisi võrrandeid, tasub kaaluda X ja Y telje.
Arvestades X suunda:
a x \u003d. konstantne.
V FX \u003d V I X + A X ΔT
X f \u003d x i + v i x Δt + 1 / 2a x Δt 2
Δt \u003d v fx -v ix / a x
V FX 2 \u003d V IX 2 + 2AX Δx
X f \u003d x i + 1/2 (v fx + v ix) δ t.
Ja arvestades y:
a y \u003d. konstantne.
V fy \u003d v iy + a y δt
y f \u003d y i + v Δt + 1/2 a x Δt 2
Δt \u003d v fy - v iy / a y
V FY 2 \u003d V IY 2 + 2 ay δ y
y f \u003d y i +1/2 (v fy + v iy) Δt.
V F - Lõplik kiirus (m / s), \\ t
V I - esialgne kiirus (m / s),
a - Kiirendus (m / c 2), \\ t
t - aeg (id),
X - lõplik positsioon (m), \\ t
X 0 - esialgne asend (m).
Liiguta mahajäetud mürsk on parim näide, et kirjeldada objekti liikumist kahes mõõtmes. Siin liigub keha nii Y-vertikaalses asendis ja horisontaalasendis X, nii et me võime öelda, et objektil on kaks kiirust.
Kinemaatikate ülesannete näited
Ülesanne 1.: Esialgne veoauto kiirus on null. Esialgu see objekt on puhata. Ta hakkab tegutsema ühtse kiirenduse ajal ajavahemikus 5,21 sekundit. Veoauto sõitnud vahemaa on 110 m. Leia kiirendus.
Otsus:
Vahemaa S \u003d 110 m möödas
Esialgne kiirus v i \u003d 0,
Aeg t \u003d 5,21 s,
Kiirendus a \u003d?
Kinemaatika põhikontseptsiooni ja valemi kasutamine võib järeldada
s \u003d V I T + 1/2 A T 2,
110 m \u003d (0) × (5.21) + 1/2 × a (5.21) 2, \\ t
a \u003d 8,10 m / s 2.
Ülesanne 2: Punkt liigub mööda x-telge (cm), pärast t sekundit reisimist, seda saab esitada võrrandi X \u003d 14T 2 - T + 10. On vaja leida punkti keskmine punkt, tingimusel et t \u003d 3s?
Otsus:
Positsiooni punkti t \u003d 0 on x \u003d 10 cm.
Juures t \u003d 3s, x \u003d 133 cm.
Keskmine kiirus, V AV \u003d Δx / ΔT \u003d 133-10 / 3-0 \u003d 41 cm / s.
Mis on viide
Liikumise ajal võib öelda ainult siis, kui on midagi, mille suhtes kaalutakse uuritud objekti positsiooni muutmist. Sellist objekti nimetatakse võrdlusorganiks ja see on alati fikseeritud ühe jaoks eeldatav.
Kui ülesanne ei ole täpsustatud, kus aruande süsteem liigub materjali punkti, vaikimisi maad peetakse vaikimisi keha. See ei tähenda siiski, et fikseeritud aja jooksul teatud ajahetkel, objekt, mille suhtes liikumist teostatakse, ei saa mingit muud arvutatust mugavat. Näiteks võrdlusorgani jaoks saate võtta liikuva rongi, pöörates autot ja nii edasi.
Võrdlussüsteem ja selle väärtus kinemaatikas
Resolutsiooni kirjeldamiseks on vaja kolme komponenti:
- Koordinaatide süsteem.
- Lähtepunkt.
- Seadme mõõteaja mõõtmiseks.

Võrdlusorgan, sellega seotud koordinaatide süsteem ja mõõteajaga seade moodustavad võrdlussüsteemi. Liikumisest räägib mõttetu, kui see seda ei täpsusta. Õige valitud võrdlussüsteem võimaldab teil lihtsustada liikumise kirjeldust ja vastupidi, kui see on valitud.
See on sel põhjusel, et inimkond uskus, et päike liigub ümber maa ja et see oli kesklinnas universumi. Selline valguse keeruline liikumine, mis on seotud asjaoluga, et maine vaatlejad on võrdlussüsteemis, mis on väga keerukas liikumine. Maa pöörleb ümber oma telje ja samal ajal ümber päikese käes. Tegelikult, kui muudate võrdlussüsteemi, siis kõik taevakehade liikumine on kergesti kirjeldatud. Seda tehti korraga Copernicus. Ta tegi ettepaneku oma maailma järjekorra kirjelduse kohta, kus päike on liikumatu. Selle osas kirjeldage planeetide liikumist palju lihtsam kui see, kui keha on maa.

Kinemaatika põhikontseptsioonid - tee ja trajektoor
Olgu teatud punkt esmalt asendis a, pärast mõnda aega osutus asendisse V. Nende vahel saate veeta üks rida. Aga nii, et see otsese kaasata rohkem teavet liikumise, see tähendab, kus ja kus keha liikunud, see ei tohiks olla mitte ainult segment, kuid suund, tavaliselt tähistatakse kirja S. keha liikumine, on nimetatakse vektoriks, mis on läbi viidud objekti esialgsest asendist piiratud.

Kui keha oli algselt punktis a ja siis osutus punktis B, ei tähenda see, et see kolis ainult sirgjoonel. Ühest positsioonilt teisele saate lõpmatu arvu võimalusi. Kinemaatika põhikontseptsioon - trajektoori teine \u200b\u200brida, kus keha liigub. Ja selle pikkust nimetatakse teeks, mida tavaliselt tähistatakse tähed l või L.
Seanss läheneb ja on aeg, et me saame teooriast praktiseerida. Nädalavahetusel istusime ja arvasime, et paljudel õpilastel peaks olema hea füüsiline valem. Kuiv valemid selgitusega: lühidalt, lühidalt, midagi üleliigne. Väga kasulik asi ülesannete lahendamisel teate. Jah, ja eksamil, kui ta saab pea peale hüpata, täpselt seda, et päev enne selle indekseerimist teenib selline valik suurepärase teenuse.
Enamik ülesandeid tavaliselt küsitakse kolme kõige populaarsemad osa füüsika. see mehaanika, termodünaamika ja molecular füüsika, elektrienergia. Ja võtke need!
Põhivaitsemid füüsika dünaamika, kinemaatika, staatilise
Alustame kõige lihtsamaga. Vana hea lemmik sirge ja ühtlane liikumine.
Kinemaatika valemid:
Loomulikult me \u200b\u200bei unusta liikumist ringi ja jätkake Newtoni dünaamikat ja seadusi.

Pärast dünaamikat on aeg kaaluda organite ja vedelike tasakaalutingimusi, st Staatika ja hüdrostaatika

Nüüd esitame põhilised valemid teemal "töö ja energia". Kus me ilma nendeta!

Molecular füüsika ja termodünaamika peamised valemid
Me lõpetame mehaanika osa valemid kõikumiste ja lainete ja liikumisega molekulaarsele füüsikale ja termodünaamikale.

Koefitsient kasuliku, seaduse Gay-Loursak, Klapaireron-Mendeleev võrrandi - kõik need armas süda valem kogutakse allpool.
Muideks! Kõigi meie lugejate jaoks on nüüd allahindlus 10% kohta mis tahes liiki töö.

Füüsika põhilised valemid: elekter
On aeg liikuda elektrienergiasse, kuigi see armastab vähem termodünaamikat. Alustame elektrostaatikutega.


Ja trumlifraktsiooni all, viimistlus valemid OMA, elektromagnetilise induktsiooni ja elektromagnetiliste võnkumiste seadusele.

See on kõik. Muidugi, oleks võimalik tuua kogu mägi valem, kuid see pole midagi. Kui valemid muutuvad liiga palju, saate kergesti segaduses ja seal nad võivad sulatada aju. Loodame, et meie füüsika põhivahemite petmine aitab lahendada lemmikülesandeid kiiremini ja tõhusamalt. Ja kui soovite midagi selgitada või ei leidnud vajalikku valemit: küsi ekspertidelt student Service. Meie autorid hoiavad peaga valemeid ja klõpsake ülesandeid nagu pähklid. Kontakt ja Varsti on sulle "hammastel".
Esiteks tuleb märkida, et see on geomeetrilise punkti kohta, st ruumi pindala, millel ei ole suurusi. See on selle abstraktse pildi (mudel) ja kõigi allpool esitatud määratluste ja valemite jaoks. Kuid lühiduse eest räägin jätkuvalt liikumisest kere, objekt või osakesed. Seda ma olen ainult selleks, et teil oleks lihtsam lugeda. Kuid alati meeles pidada, et me räägime geomeetrilisest punktist.
Raadiuse vektor Punktid on vektor, mille algus langeb kokku koordinaatsüsteemi algus ja lõpp on selles küsimuses. Raadiuse vektor on märgitud reeglina kirjas r.. Kahjuks määravad mõned autorid oma kirja s.. Ma soovitan tungivalt ära kasuta Määramine s. Raadiuse vektori jaoks. Fakt on see, et valdav enamus autoritest (nii kodumaiste kui ka välisriikidena) kasutavad tähed Scalar'i ja raadiuse vektorile tee näitamiseks ei ole reeglina suhet. Kui te tähistate raadiuse vektorit s.Saate kergesti segaduses. Jällegi kasutame me nagu kõik tavalised inimesed järgmist märget: r. - RADIUS-vektoripunkt, s - punkti vastu suunatud tee.
Liikumise vektor (Sageli ütlevad nad lihtsalt - liikuma) - see on vektorKelle alustamine langeb kokku trajektoori punktiga, kus selle liikumise uurimist alustasime keha ja selle vektori lõpp langeb selle uue uuringu punktiga, kus me seda uuringut uurisime. Me tähistame seda vektorit kui δ r.. Sümboli kasutamine δ on ilmne: δ r. - See vahe raadiuse vektori vahel r. Uuritud trajektoori segmendi ja raadiuse vektori lõpp-punkt r. 0 selle segmendi päritolu punkti (joonis 1), st δ r \u003d. r. − r. 0 .

Trajektoor - See on rida, mis keha liigub.
Tee - See on summa pikkuse kõikide osade sektsioonide järjestikku rahuldav keha sõidu ajal. Seda tähistatakse kas δs, kui tegemist on trajektoori saidil või s, kui me räägime kogu täheldatud liikumise trajektoori pärast. Mõnikord (harva) tee tähistatakse teise kirja, näiteks l (lihtsalt ei näita seda R, me juba rääkinud sellest). Pea meeles! Tee on positiivne skalaarne! Liikumise protsessi tee ainult suurenemine.
Liikumise keskmine kiirus v. vrd.
v. cf \u003d δ. r./ Δt.
Liikumise kiirus V kiirus - See on väljendiga defineeritud vektor
v. \u003d D. r./ Dt.
Keskmine kiirusetee V Kolm on väljendiga defineeritud skalar
V cp \u003d δs / Δt.
Teisi nimetusi leitakse sageli näiteks
Instant Speed \u200b\u200bPath V on väljendiga defineeritud skalar
Moodul hetkeline liikumise kiirus ja hetk kiirus tee on sama, sest dr \u003d ds.
Keskmine kiirendus a.
a. cf \u003d δ. v./ Δt.
Instant kiirendus (Või lihtsalt, kiirendus) a. - See on väljendiga defineeritud vektor
a. \u003d D. v./ Dt.
Tangentsiaalne (tangentsiaalne) kiirendus a τ (alumine indeks on kreeka väiketäht Tau) - see vektorsee on vektori projektsioon Instant kiirendus puutuja teljele.
Normaalne (tsentripeel) kiirendus a n - see vektorsee on vektori projektsioon Instant kiirendus teljel normaalse.
Tanneri kiirendusmoodul
| a. τ | \u003d DV / DT,
See tähendab, et see on hetkelise kiiruse derivaatmoodul.
Normaalse kiirenduse moodul
| a. n | \u003d V2 / R,
Kui R on raadiuse raadiuse suurus trajektoori kumeruse kohas keha leidmise kohas.
Oluline! Ma tahan pöörata tähelepanu järgmisele. Ärge segage puutuja ja tavapäraste kiirenduste puudutavate märgetega! Fakt on see, et sellel juhul kirjanduses on täheldatud täielikku abiklahvi.
Pea meeles!
a. τ - see on vektor tangentsiaalne kiirendus
a. n - see vektor Tavaline kiirendus.
a. τ I. a. n on vektor Täieliku kiirenduse prognoosid aga puutuja telje ja normaalse telje kohta vastavalt
A τ on projektsioon (skalar!) Tanner kiirendus puutuja teljele,
N on projektsioon (Scalar!) Tavaline kiirendus põhiteljele,
| a. τ | - see moodul vektor tangentsiaalne kiirendus
| a. n | - see on moodul vektor Tavaline kiirendus.
Eriti ei ole üllatunud, kui lugemine kirjanduses kõverjoonel (eriti pöörleva) liikumise kohta leiate, et autor a τ arutab vektorit ja selle prognoosi ja selle moodulit. Sama kehtib ka n. Kõik, nagu nad ütlevad: "Ühes pudelis". Ja see kahjuks täielikult ja lähedal. Isegi õpikud kõrghariduse ei ole erand, paljudes neist (uskuge mind - enamikus!) Täielik segadus valitseb selle kohta.
Niisiis, ei tea Azovi vektori algebra või nende tähelepanuta jätmine, füüsiliste protsesside uurimisel ja analüüsimisel on väga lihtne täielikult segaduses. Seetõttu on vektori algebra teadmised kõige edukam edu saavutamine Mehaanika uuringus. Ja mitte ainult mehaanika. Tulevikus, kui uurida teisi füüsika osad, siis korduvalt veenduge, et.
Instant nurgeline kiirus (Või lihtsalt, nurbumiskiirus) ω - See on väljendiga defineeritud vektor
ω \u003d D. φ / dt,
Kus D. φ - Infinisly väike muutus nurgalise koordinaadi (D φ - Vektor!).
Instant nurgeline kiirendus (Või lihtsalt, nurgakiirendus) ε - See on väljendiga defineeritud vektor
ε \u003d D. ω / Dt.
Kommunikatsioon vahel v., ω ja r.:
v. = ω × r..
Kommunikatsioon V, ω ja R vahel:
Kommunikatsioon | a. τ |, ε ja R:
| a. τ | \u003d ε · r.
Nüüd mine K. kinemaatilised võrrandid konkreetsed liikumise liigid. Need võrrandid tuleb õppida peast.
Ühtse ja sirgjoonelise liikumise kinemaatiline võrrand See on vorm:
r. = r. 0 + v. t
Kus r. - raadiusevektori objekt ajal t, r. 0 on esialgsel ajal T 0 (vaatluste alguse ajal).
Konstantse kiirenduse kinemaatiline võrrand See on vorm:
r. = r. 0 + v. 0 t +. a.t 2/2, kus v. 0 objekti kiirus ajal t 0.
Ostukiiruse võrrand püsiva kiirendusega liikumisel See on vorm:
v. = v. 0 + a. t.
Ühetaolise liikumise ühekordse võrdse võrrandi ümbermõõdu ümber polaarse koordinaate See on vorm:
φ \u003d φ 0 + ω z t,
Kui φ on keha nurgeline koordineerimine ajahetkel, φ 0 on keha nurga koordineerimine vaatluse alguse ajal (esialgsel hetkel), ω Z on nurgakiiruse projektsioon ω Z-teljel (tavaliselt see telg valitakse risti pöörlemise tasapinnaga).
Kinemaatiline võrrand ringi ringi konstantse kiirendusega polaarse koordinaadid See on vorm:
φ \u003d φ 0 + ω 0Z T + ε Z T 2/2.
Harmooniliste võnkumiste kinemaatiline võrrand X-teljel See on vorm:
X \u003d a cos (ω t + φ 0),
Kui a on võnkumiste amplituud, on ω tsükliline sagedus, φ 0 - võnkumiste algfaas.
Point kiiruse projektsioon, kõikumine piki X telje, sellel teljel võrdne:
V x \u003d - ω · a · patt (ω t + φ 0).
Punkti kiirenduse prognoosimine, selle telje vastu X-telje kõikumine võrdne:
Ja x \u003d - ω 2 · a · cos (ω t + φ 0).
Kommunikatsioon Tsüklilise sageduse ω vahel, tavaline sagedus ƒ ja võnkumiste periood T:
ω \u003d 2 㟟 \u003d 2 π / t (π \u003d 3.14 - number PI).
Matemaatiline pendeli Sellel on väljendusega määratletud võnkumiste periood:
Söötmise väljenduse lugemisel - pendeli hõõgniidi pikkus, nimetaja - vaba languse kiirendus
Kommunikatsioon absoluutse vahel v. ABS, sugulane v. Rels ja kaasaskantav v. Kiiruse kohta:
v. abs \u003d v. Rev +. v. per.
Siin võib-olla kõik määratlused ja valemid, mis võivad olla vajalikud kinemaatika probleemide lahendamisel. Ülaltoodud teave viide ainult olemuselt ja ei saa asendada e-raamat, kus see on üksikasjalikult ja ma loodan, on põnev teooria selle osa mehaanika.
SI süsteemi mõõteväärtuste põhiseadmed Selline:
- pikkuse pikkuse (1 m) ühik, \\ t
- aeg - teine \u200b\u200b(1 s),
- massid - kilogramm (1 kg), \\ t
- aine kogus on mool (1 mol),
- temperatuurid - Kelvin (1 K),
- elektrilised voolujõud - amp (1 a), \\ t
- Viide: kerge jõud - Candela (1 CD, tegelikult ei kasutata kooliülesannete lahendamisel).
Süsteemi arvutuste arvutamisel mõõdetakse nurgad radiaanides.
Kui füüsika ülesanne ei ole täpsustatud, kus ühikutes tuleb vastata, tuleb see esitada SI-süsteemi üksustes või nende tuletisinstrumentides nende väärtused, mis vastavad selle füüsilisele suurusele. Näiteks kui ülesanne peab leidma kiirust ja ei ütle, mida ta tuleb väljendada, tuleb vastus esitada m / s.
Mugavuse huvides peavad füüsika ülesanded sageli kasutama dollareid (vähendamine) ja mitmekordset (kasvavat) konsooli. Neid saab rakendada mis tahes füüsilise suurusega. Näiteks MM on millimeeter, CT - Kilotonne, NS - Nanosecond, MG - Megagrams, mmol - millimool, MCA - mikromper. Pidage meeles, et füüsikas puuduvad topeltkonsoolid. Näiteks on ICG mikrogrammi ja mitte millikilogramm. Pange tähele, et väärtuste lisamisel ja lahutamisel saate kasutada ainult sama mõõtme väärtusi. Näiteks kilogrammi saab kokku volditud ainult kilogrammidega, saate maha arvata ainult millimeetrite ja nii edasi. Väärtuste ülekandmisel kasutage järgmist tabelit.
Tee ja liikumine
Kinemaatika Nad nimetavad mehaanika jaotisele, kus keha liikumist peetakse ilma selle liikumise põhjuste selgitamiseta.
Mehaaniline liikumine Asutused kutsuvad muutust oma positsioonis ruumi teiste kehade suhtes aja jooksul.
Iga keha on määratletud mõõtmed. Kuid paljudes ülesannetes mehaanika ei ole vaja näidata keha üksikute osade positsioone. Kui keha suurused on väikesed võrreldes teiste kehade vahemaadega, siis võib seda keha kaaluda materjalipunkt. Nii et kui auto liigutades pikki vahemaid, saate seda pikka aega tähelepanuta jätta, sest auto pikkus on väike võrreldes selle kaugemate vahemaadega.
See on intuitiivne, et liikumise omadused (kiirus, trajektoor jne) sõltuvad sellest, kus me seda vaatame. Seetõttu on liikumise kirjeldamiseks kasutusele võrdlussüsteemi mõiste. Võrdlussüsteem (CO) - Võrdluskeha kombinatsioon (seda peetakse absoluutselt tahkeks), mis on sellega seotud koordinaatsüsteemi abil, joonlaud (seadme mõõtmine), tundide ja aja sünkroniseerijaga.
Liigub aja jooksul ühest punktist teise, keha (materjalipunkt) kirjeldab antud liinil keha liikumise trajektoor.
Keha ümberpaigutamine Nad nimetavad suunda lõigatud joon, mis ühendab keha esialgse asendi oma lõpp-asendiga. Liiguta seal on vektori suurus. Liikumine võib liikumise protsessi suureneda, vähendada ja muutuda nulliks.
Möödunud tee võrdne keha kehast möödunud trajektoori pikkusega mõnda aega. Tee on skalaatori väärtus. Tee ei saa vähendada. Tee ainult suureneb kas jääb konstantseks (kui keha ei liigu). Kui keha liigub mööda kõverjoonelise trajektoorit, on liikumisvektori moodul (pikkus) alati vähem kui sõitnud tee.
Jaoks ühtne (pideva kiirusega) liikumistee L. Võib leida valemiga:
kus: v. - kehakiirus, t. - aeg, mille ta kolis. Kinemaatikaülesannete lahendamisel on liikumine tavaliselt geomeetrilistest kaalutlustest. Sageli vajavad liikumise asukoha geomeetrilised kaalutlused Pythagores Theoremi tundmist.
keskmine kiirus
Kiirus - vektori kogus, mis iseloomustab keha kosmoses liikumise kiirust. Kiirus on keskmine ja hetkeline. Kiire kiirus kirjeldab selle konkreetse ruumi liikumist selle konkreetse ajahetkel ja keskmine kiirus iseloomustab üldiselt kogu liikumist tervikuna, ilma et see kirjeldaks iga konkreetse saidi liikumise üksikasju.
Keskmine kiirusetee - See on suhte kogu aeg kogu aeg liikumisse:

kus: L. täis - kõik viis, kuidas keha möödas, t. Täielik - kogu aeg liikumise.
Liikumise keskmine kiirus - See on kogu liikumise suhe kogu liikumise ajaks:

See väärtus on suunatud samuti keha täieliku liikumise (see tähendab alguspunkti liikumise lõpppunkti). Samal ajal ärge unustage, et täielik liikumine ei ole alati võrdne teatavate liikumistappide algebralise liikumise algebralisusega. Täielik liikumisvektor on võrdne liikumise vektori summaga liikumise eraldi etappides.
- Kinemaatiliste probleemide lahendamisel ärge tehke väga tavalist viga. Keskmine kiirus ei ole tavaliselt võrdne keskmise aritmeetilise keha kiirusega igas liikumisjärgus. Aritmeetiline keskmine saadakse ainult teatud juhtudel.
- Ja veelgi enam, keskmine kiirus ei ole võrdne ühe kiirusega, mida keha liigub liikumise ajal, isegi kui sellel kiirusel oli vahepealne väärtus võrreldes teiste kiirustega, millega keha liigub.
Võrdne küsis sirge liikumist
Kiirendus - vektor füüsiline kogus, mis määrab keha keha muutmise kiiruse. Keha kiirendus nimetatakse kiiruse muutuse suhe ajavahemikuks, mille jooksul kiiruse muutus toimus:
![]()
kus: v. 0 - Esialgne kehakiirus, v. - lõplik kehakiirus (st pärast aja möödumist t.).
Lisaks, kui probleemi seisundis ei ole teisiti märgitud teisiti, usume, et kui keha liigub kiirendusega, jääb see kiirendus konstantseks. Sellist keha liikumist kutsutakse kahekordne (Või võrdne). Tasakaalu liikumise korral varieerub kehakiirus samaväärse aja jooksul sama väärtuse suhtes.
Võrdne küsitud liikumine on tegelikult kiirendatud, kui keha suurendab kiirust ja aeglustab kiiruse vähenemist. Lihtsuse jaoks on ülesanded mugavad aeglasele liikumisele, et võtta kiirendusmärgiga kiirendus "-".
Eelmisele valemile tuleks kirjeldada veel ühte tavalisemat valemit kiiruse muutmine aja jooksul Tasakaaluliikumisega:
Liiguta (kuid mitte tee) Tagasitud liikumise korral arvutatakse valemid valemite poolt:

![]()
Viimasel valelis kasutati ühe samaväärse liikumise omadust. Tasakaalu liikumisega saab keskmist kiirust arvutada aritmeetilise keskmise ja lõpliku kiirusena (see vara on mõnede ülesannete lahendamisel väga mugav):
Tee arvutamisel tee kõik on keerulisem. Kui keha ei muutnud liikumissuunda, siis tasakaalustatud sirge liikumisega on tee arvuliselt võrdne liikumisega. Ja kui see muutus - on vaja lugeda teed eraldi enne peatamist (hetke muutmine) ja tee pärast peatumist (ümberpööramise hetk). Ja vaid mõnda aega vastupanu valemis liikumiseks antud juhul toob kaasa tüüpilise vea.
Kooskõlastama Tasakaalus liikumises muudatused seaduse alusel:

Projektori kiirus Tasakaalu liikumise korral muudab see vastavalt sellisele seadusele:
![]()
Sarnased valemid saadakse ülejäänud koordinaatide teljete puhul.
Vaba langus vertikaalsete
Kõigil asuvatel asutustel maa, raskusaktide jõudu. Toetuse või peatamise puudumisel põhjustab see võim keha maapinnale. Kui te hooletate õhku vastupidavust, nimetatakse keha liikumist ainult raskusastme all vabaks languseks. Gravity aruannete jõud mis tahes asutustele, olenemata nende kujust, massist ja suurustest, sama kiirendusest, mida nimetatakse vaba languse kiirendamiseks. Maa pinna lähedal raskusastme kiirenemine Summa:
See tähendab, et vaba langus kõigis kehade lähedal maapinna lähedal on samaväärne (kuid mitte tingimata lihtne) liikumine. Kõigepealt kaaluge kõige lihtsamat vaba languse juhtumit, kui keha liigub rangelt vertikaalselt. Selline liikumine on lihtne liikumine, nii et kõik eelnevalt uuritud mustrid ja sellise liikumise keskenduvad sobivad vaba sügisel. Ainult kiirendus on alati võrdne vaba languse kiirendamisega.
Traditsiooniliselt vaba langus, suunatud vertikaalselt telje Oy kasutatakse. Siin pole midagi kohutavat. Lihtsalt vaja kõikides valemites indeksi asemel " h.»Kirjutage" w." Selle indeksi ja märke määratlemise reegli tähendus on säilinud. Kust suunata OY telje - teie valik sõltuvalt probleemi lahendamise mugavusest. Valikud 2: üles või alla.
Anna meile mõned valemid, mis lahendavad mõned konkreetsed kinemaatika ülesanded vertikaalsete jaoks vaba languse jaoks. Näiteks kiirus, millega keha langeb kõrgus langeb h. Ilma esialgse kiiruseta:
Keha langeb aeg kõrgusest h. Ilma esialgse kiiruseta:

Maksimaalne kõrgus, mille keha tõuseb, mahajäetud vertikaalselt esialgse kiirusega v. 0, selle keha tõsteaeg maksimaalsele kõrgusele ja täieliku lennuaja jooksul (enne lähtepunkti naasmist):
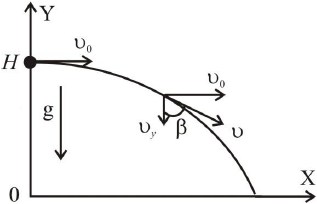
Horisontaalne viskamine
Horisontaalse viskamise esialgse kiirusega v. 0 Keha liikumist peetakse mugavalt kahe liikumisena: ühtlane piki teljelit OH-d
Kiirus igal ajal suunab trajektoor. Seda saab lagundada kaheks komponendiks: horisontaalne ja vertikaalne. Horisontaalne komponent jääb alati samaks ja võrdseks v. x \u003d. v. 0. Ja vertikaalne suurenemine vastavalt kiirendatud liikumise seadustele v. y \u003d. gT.. Kus täielik keha kiirus Võib leida valemid:
![]()
![]()
Oluline on mõista, et keha languse aeg ei sõltu sellest, milline horisontaalne kiirus see visati, kuid määratakse ainult kõrgus, millega keha visati. Aja langeva keha maapinnale on valemiga:

Kui keha langeb, liigub see samaaegselt mööda horisontaalset telge. Seega, keha lennuvahemik Või vahemaa, mida keha saab OH-teljel lennata, on võrdne:
Iga nurgas horisondi ja keha kiirus on suhteliselt kergesti leida:

Mõnikord mõnikord ülesanded võivad küsida aega, mil kogu keha kiirus kallutatakse teatud nurga all vertikaalne. Siis see nurk on suhe:

Oluline on mõista, milline nurk ilmub ülesandel (vertikaalse või horisontaalse). See aitab teil valida õige valemi. Kui te lahendate selle probleemi koordinaatide meetodiga, siis koordinaadi muutuste seaduse üldvalemile tasakaalu liikumisega: \\ t
![]()
See konverteeritakse järgmisesse liikumisõiguse juurde piki Oy telge keha mahajäetud horisontaalse keha jaoks:
Tema abiga leiame, et kõrgus, millele keha paikneb igal ajal. Samal ajal langeb keha ajal keha koordinaat keha piki Oy telje on null. Ilmselgelt liigub keha teljel mööda ühtlaselt koordinaatmeetodi raames horisontaalset koordinaati seadusega:
Visake silmapiirile nurka (maapinnast maa peal)
Maksimaalne tõstekõrgus horisondi nurga viskamisel (esialgse taseme suhtes):

Tõsteaega maksimaalsele kõrgusele, kui horisondi nurga viskamine:

Lennuvahemik ja kehaosa kehast mahajäetud kehaasutuse täiskohaga horisondile (tingimusel, et lend lõpeb sama kõrgusega, millega keha visati, näiteks maa peal maa peal):

Horisondi nurga all mahajäetud keha minimaalne kehamäär on tõstes kõrgeimas punktis ja on võrdne:
Maksimaalne kehamäär Horisondi nurga all mahajäetud on maapinna viskamise ja langemise hetkedel ning on võrdne esialgse ühega. See avaldus on tõsi ainult maa peal maa peal. Kui keha jätkab lennata allpool taset, millest ta visati, siis on seal kasvava ja kiiremini.
Kiiruse lisamine
Tel Liikumist saab kirjeldada erinevates võrdlussüsteemides. Kinemaatika seisukohast on kõik võrdlussüsteemid võrdsed. Kuid liikumise kinemaatilised omadused, nagu trajektoor, liikumine, kiirus, erinevad erinevates süsteemides. Väärtused sõltuvad võrdlussüsteemi valikust, milles nende mõõtmist tehakse suhteliseks. Seega rahu ja liikumine keha suhteline.
Seega on absoluutne kehamäär võrdne vektori summaga selle kiirusega võrreldes liikuva koordinaatide süsteemiga ja mobiilse võrdlussüsteemi kiirusega. Või teisisõnu, kehakiirus fikseeritud võrdlussüsteemis on võrdne vektori koguse kehakiirusega vallasüsteemi ja liikuva võrdlussüsteemi kiirusega suhteliselt fikseeritud.
Ühtne liikumine ringi ümber
Keha liikumine ümbermõõdu ümber on spetsiaalne juhtum kõverjoonelise liikumise. Seda tüüpi liikumist peetakse ka kinemaatikas. Kumerdatud liikumise korral on keha kiiruse vektor alati suunatud trajektoorile puutuja. Sama asi juhtub ringi ümber sõites (vt joonist). Ühtne liikumine keha ümber ringi iseloomustab mitmeid väärtusi.

Periood - Aeg, mille keha liigub ringi ümber, teeb ühe täieliku pöörde. Mõõtühik - 1 s. Ajavahemik arvutatakse valemiga:
Sagedus - revolutsioonide arv, mis tegi keha ümbermõõdu ümber aja ühe aja jooksul. Mõõtmisüksus - 1 REV / S või 1 Hz. Sagedus arvutatakse valemiga:
Mõlemas valemites: N. - revolutsioonide arv aja jooksul t.. Nagu ülaltoodud valemitest nähtub, tõlgendamise ulatuse periood ja sagedus:
![]()
Jaoks Ühtne pöörlemiskiirus Kehad määratletakse järgmiselt:
![]()
kus: l. - keha pikkus või tee pikkus võrdse perioodi jooksul T.. Kui keha liigub ringi ümber, on mugav kaaluda nurga liikumist φ (või rotatsiooni nurk), mõõdetuna radiaanides. Nurkkiirustik ω Keha siinkohal nimetatakse väikese nurga liikumise suhe δ φ väikese aja jooksul δ t.. Ilmselgelt võrdse aja jooksul T. Keha liigub nurga võrdne 2-ga π Seega, ühtlase liikumisega ringi ümber, valemid tehakse:
![]()
Kinnituskiirust mõõdetakse rad / s. Ärge unustage üle kanda nurki kraadist radiaanidele. Dougie pikkus l. seotud rotatsiooni nurgaga suhtega:
Lineaarse kiiruse mooduli vaheline suhtlemine v. ja nurgeline kiirus ω :
![]()
Kui keha liigub ringi ümber konstantse mooduliga, muutub ainult kiiruse vektori suund, mistõttu keha liikumine ümbermõõduga konstantse kiirusega kiirusega on liikumine kiirendusega liikumine (kuid mitte võrdne), \\ t pärast kiiruse muutuste suunda. Sellisel juhul suunatakse kiirendus ringi keskele raadiusele. Seda nimetatakse normaalseks või tsentripetaali kiirendusKuna kiirendusvektor on ringi mis tahes punktis suunatud selle keskusele (vt joonist).

Centripetaalse kiirenduse moodul Lineaarne on seotud v sellel saidil. Selleks on vaja midagi, nimelt, et pühendada füüsika ja matemaatika ettevalmistused füüsika ja matemaatika uurimises, teooria ja probleemide lahendamisel kolm või neli tundi iga päev. Fakt on see, et CT on eksam, kus ei piisa füüsika või matemaatika tundmisest, peate suutma kiiresti ja ilma ebaõnnestumisteta lahendada suur hulk ülesandeid erinevatel teemadel ja erineva keerukusega. Te saate õppida ainult tuhandete ülesannete lahendamiseks.
Nende kolme objekti edukas, hoolikas ja vastutustundlik rakendamine ning lõpliku koolituskatsete vastutustundlik uuring võimaldab teil näidata suurt tulemust CT-le, maksimaalselt sellest, mida te olete võimeline.
Leidis vea?
Kui arvate, et näete, et teil on kogemusi koolitusmaterjalides, palun kirjutage sellest e-posti teel (). Kirjas täpsustage teema (füüsika või matemaatika), nimi või number teema või test, ülesande number või koht tekstis (leht), kus te arvate, et on viga. Kirjeldage ka seda, mis on hinnanguline viga. Teie kiri ei jää märkamatuks, viga kas fikseeritakse või selgitate, miks see ei ole viga.