3.1. Întrebare. Este posibil să se rotească „prin inerție”? Cum diferă inerția liniară de inerția de rotație?
Răspuns. La prima vedere, rotația demonstrează proprietățile inerției chiar mai clar decât mișcarea liniară. Un volant care se rotește în vid pe o suspensie magnetică se poate mișca ani de zile, deoarece influențele externe asupra acestuia sunt minimizate.
Newton, explicând legea inerției pe care a descoperit-o, dă următoarea explicație: „Un vârf, ale cărui părți, datorită aderenței reciproce, se distrag reciproc de la mișcarea rectilinie, nu încetează să se rotească uniform, deoarece această rotație nu este încetinită. prin rezistența aerului.” Această frază de la Newton te face să te gândești serios la întrebarea pusă.
Cu toate acestea, strict vorbind, mișcarea prin inerție nu poate fi decât uniformă și rectilinie. Aceasta înseamnă că nu poate exista rotație din cauza inerției în mecanica newtoniană pe care o acceptăm. Dar un corp solid masiv rămâne în stare de repaus sau rotație uniformă până când este scos din această stare de un moment al forțelor externe. Prin urmare, de fapt, fenomenul de inerție are loc și aici, deși diferit de cazul clasic. Ce este comun și care este diferența dintre inerția de rotație și inerția în timpul mișcării rectilinie?
Inerția unui punct masiv (corp) depinde doar de masa acestuia. Masa este o măsură a inerției unui corp în timpul mișcării de translație, inclusiv liniară. Aceasta înseamnă că, cu o astfel de mișcare, inerția nu este afectată de distribuția maselor în corp, iar acest corp poate fi luat în siguranță ca punct material (masiv). Masa acestui punct este egală cu masa corpului, iar punctul este situat în centrul de masă sau centrul de inerție al corpului. Dacă rotiți o tijă cu greutăți masive montate pe ea în jurul axei verticale Z (Fig. 6), veți observa că atâta timp cât greutățile sunt aproape de centru, este ușor să desfaceți tija. Dar dacă greutățile sunt depărtate, va deveni mai dificil să desfaceți tija, deși masa acesteia nu s-a schimbat.
Orez. 6. Schema modificării momentului de inerție al corpului.
Prin urmare, inerția unui corp în timpul rotației depinde nu numai de masă, ci într-o măsură mai mare de distribuția acestei mase în raport cu axa de rotație. O măsură a inerției unui corp în timpul rotației este momentul axial de inerție eu, egal cu suma produselor maselor T toate particulele corpului după pătratele distanțelor lor h din axa de rotație:
Momentul axial de inerție joacă același rol în timpul mișcării de rotație ca și masa în timpul mișcării de translație (rectilinii) și, prin urmare, este o măsură a inerției (inerției) unui corp în timpul mișcării de rotație.
După cum știm, legea inerției stabilește echivalența repausului relativ și a mișcării rectilinie uniforme - mișcarea prin inerție. Este imposibil de determinat prin orice experiment mecanic dacă un corp dat este în repaus sau se mișcă uniform și în linie dreaptă. Nu este cazul în mișcarea de rotație. De exemplu, nu este deloc indiferent dacă vârful este în repaus sau se rotește uniform cu o viteză unghiulară constantă. După cum a menționat A. Yu. Ishlinsky, viteza unghiulară a unui corp solid este o mărime care îi caracterizează starea fizică. Viteza unghiulară poate fi măsurată, de exemplu, prin determinarea deformațiilor elastice ale unui corp, fără nicio informație despre poziția corpului în raport cu sistemul de coordonate „absolut”. Prin urmare, termenul „viteza unghiulară absolută a unui corp”, în contrast cu „viteza absolută a unui punct”, ar trebui folosit în sens literal (fără ghilimele).
Astfel, fenomenele mecanice dintr-un sistem staționar și rotativ se vor desfășura diferit, ca să nu mai vorbim de faptul că dacă corpul este răsucit suficient de puternic, acesta va fi rupt din cauza tensiunilor care au apărut în el.
O altă diferență este că mișcarea uniformă rectilinie și repausul sunt echivalente, iar rotația, chiar și cu o viteză unghiulară constantă, poate fi distinsă clar nu numai de repaus, ci și de rotația cu o viteză unghiulară diferită.
Aici este oportun să menționăm opiniile fizicianului austriac Ernst Mach (1838–1916), care a avut o mare influență asupra formării principiului de echivalență al lui Einstein. Mach, „selectând” sistemul de coordonate adecvat, a căutat să dea legilor mecanicii o astfel de formă încât să nu depindă de rotație. Ce s-ar întâmpla dacă ar reuși? Să plasăm un observator care se rotește rapid pe un volant staționar. Apoi putem spune că, în raport cu observatorul, volantul se rotește rapid, poate chiar mai repede decât o permite puterea sa. Dar volantul nu se va rupe, deși observatorului i se pare că asupra lui acţionează un stres enorm. Și observatorul care se rotește însuși poate avea de suferit, deoarece în timpul rotației apar solicitările mecanice în el.
3.2. Întrebare. Este posibil să se formuleze legile inerției de rotație într-un mod similar cu prima lege a lui Newton?
Răspuns. Vă puteți lua libertatea de a formula „legea” inerției mișcării de rotație în imaginea și asemănarea primei legi a lui Newton: „Un corp absolut rigid izolat de momentele externe va menține o stare de repaus sau o rotație uniformă în jurul unei axe fixe până când momentele exterioare aplicate acestui corp îl vor forța să schimbe această stare.”
De ce un corp absolut solid și nu orice corp? Deoarece momentul de inerție al unui corp nerigid se va modifica din cauza deformațiilor forțate în timpul rotației, iar aceasta este echivalentă cu o modificare a masei unui punct pentru prima lege a lui Newton.
În cazul mișcării de rotație, dacă momentul de inerție nu este constant, va fi necesar să se ia ca constantă nu viteza unghiulară, ci produsul dintre viteza unghiulară ω și momentul de inerție / - așa-numita cinetică. moment LA.În acest caz, „legea” inerției de rotație va lua o formă mai generală: „Un corp izolat de momentele externe va menține constant vectorul momentului său cinetic”. Dacă corpul se rotește în jurul unei axe fixe: „Un corp izolat de momentele externe în jurul axei de rotație va menține un moment cinetic constant în jurul acestei axe.” Aceste legi, cu toate acestea, într-o formulare ușor diferită, sunt numite legile conservării momentului unghiular.
3.3. Întrebare. Pământul și Luna se rotesc în jurul unui centru de masă comun. Acționează forțele centrifuge asupra acestor corpuri cerești?
Răspuns. Ideea că atunci când punctele materiale și corpurile se rotesc în jurul unei axe sau a unui punct fix, forțele centrifuge (adică, direcționate din centrul de rotație) trebuie să acționeze asupra lor este o concepție greșită comună.
De exemplu, atât Pământul, cât și Luna sunt afectate de forțele gravitaționale îndreptate unul spre celălalt și, prin urmare, spre centrul de rotație (Fig. 7). Nu există deloc forțe îndreptate din centru aici. Pentru ca corpurile care se deplasează prin inerție, adică uniform și rectiliniu, să se îndepărteze de această cale și să înceapă să se deplaseze de-a lungul curbelor, ele trebuie să fie afectate de forțe centripete, adică direcționate către centrul de rotație, forțe. Acestea sunt forțele gravitației.

Orez. 7. Diagrama forțelor care acționează asupra sistemului Pământ-Lună.
Dacă punctul se rotește A, legat de un suport DESPRE pe o conexiune flexibilă fără greutate - filet (Fig. 8, A), apoi, neglijând forța gravitațională (să spunem că experimentul se desfășoară în imponderabilitate), putem spune că și forța centripetă acționează în acest punct. Fts. Pe firul propriu-zis, ca legătură, din partea punctului A are loc o reacție direcționată din centru R1 = Fc, iar din partea suportului DESPRE - forta R2 = Fc(Fig. 8, b). Pe suport DESPRE acte de forta Fc, dirijat din centru. Asupra firului acționează un sistem echilibrat de forțe, care nu poate influența mișcarea punctului A.

Orez. 8. Forțe care acționează asupra corpurilor într-un sistem rotativ: A - forțe care acționează asupra unui punct care se rotește într-un cerc Ași suport DESPRE; b – forțele care acționează asupra conexiunii.
În unele manuale, de exemplu, pentru școlile cu studii aprofundate ale fizicii, se subliniază în mod special că „forțele centrifuge de inerție nu acționează asupra tuturor corpurilor de pe suprafața Pământului”. Această formulare înseamnă că forțele centrifuge există și acționează asupra unor corpuri. Desigur, acest lucru nu este adevărat.
3.4. Întrebare. De ce, atunci când un corp se rotește rapid, suferă stres mecanic și poate chiar să se prăbușească, deoarece niciun alt corp nu este în contact cu el, niciun câmp de forță nu acționează asupra lui etc.?
Răspuns. Într-adevăr, dacă un experiment privind rotația, de exemplu, a unui inel metalic este efectuat în imponderabilitate și în vid, atunci niciun alt corp, nici măcar aerul, nu va interacționa cu acest corp. Acest inel poate fi accelerat de un câmp electromagnetic rotativ (de exemplu, apărut în statorul unui motor electric asincron), mai ales dacă inelul este din oțel. După ce accelerația este completă, se rotește liber la viteză unghiulară? inelul va avea energie cinetică E:
și va fi întins de stres mecanic?:
Unde eu– momentul de inerție axial al inelului;
? – densitatea materialului inelului;
v – viteza liniară a inelului.
Ce cauzează această tensiune? Am văzut mai sus că conexiunea este un filet (vezi Fig. 8, a, b) există forțe de tracțiune cauzate de punct A, rotindu-se în jurul unui suport DESPRE. La urma urmei, conexiunea este cea care acționează asupra punctului A forta centripeta Fc, îl oprește constant pe calea dreaptă naturală. În acest caz, masa (punctul A) și legătura (filetul fără greutate) se disting clar. Dar dacă ideea A eliminați, în loc de fir, luați un corp masiv - o tijă sau un lanț - și rotiți-l în jurul unui punct DESPRE, atunci imaginea va deveni mai complicată.
În astfel de cazuri, când conexiunea în sine are masă, este convenabil să o imaginăm sub forma unei conexiuni fără greutate (fir) încărcată cu puncte masive individuale (Fig. 9).

Orez. 9. Conexiune fără greutate - un fir încărcat cu mase punctiforme.
Dacă numărul de puncte este mic, forțele centripete care acționează asupra acestor puncte sunt ușor de determinat: la punctul 1 este Fts1, La punctul 2 – suma a două forțe (Ft1+ Fts2), iar la punctul 3 este maxim - suma a trei forțe (Ft1+ Ft2 + Ft3). De aici este ușor să trecem la cazul când masa este distribuită uniform pe lungimea legăturii.
Așa este și cu un inel rotativ - dacă vă imaginați că este înlocuit cu un poligon de fire imponderabile cu greutăți plasate la vârfurile colțurilor T(Fig. 10, a), apoi selectând una dintre sarcini (Fig. 10, b), putem determina forțele Fst, care acționează asupra sarcinii (reacțiile lor acționează asupra firului):
Unde Fts = m?2R sau mv2/R, care rezultă din formula (2.4).
După ce au distribuit sarcinile T uniform de-a lungul firului, obținem un inel masiv cu o densitate de ?, care are rezistență de legătură (Fig. 11). Pentru simplitatea calculelor, aruncăm jumătatea inferioară a inelului și o notăm cu F forțe de tracțiune care acționează pe partea sa asupra semi-inelului superior. Având în vedere că centrul de masă al semiinelului superior C este situat la distanță 2R/? sus din centru DESPRE, accelerația normală a acestui centru de masă este:
Scriem a doua lege a lui Newton în proiecție pe direcția accelerației normale:
Având în vedere ce tensiune? = F/S, Unde S – aria secțiunii transversale a inelului, masa semi-inelului M= ??R.S.și acea viteză liniară v= ?R, scriem ținând cont de (3.6):
Astfel, obținem formula (3.3).
În consecință, inelul rotativ se va întinde cu forță F si stresul? chiar şi fără contact cu orice alt corp. În mod similar, tensiunile apar în corpurile rotative de orice configurație, de exemplu, în mișcarea conexiunilor închise masive flexibile - curele, lanțuri, precum și volante - acumulatori de energie cinetică.

Orez. 10. Reprezentarea schematică a unui inel rotativ: A - un poligon rotativ închis cu mase punctuale plasate la vârfurile colțurilor; b – forte care actioneaza asupra unei singure sarcini.

Orez. 11. Schema de determinare a tensiunilor intr-un inel rotativ.
3.5. Întrebare. Cum se acumulează cea mai mare energie cinetică într-un volant rotativ?
Răspuns. Energia cinetică a unui inel subțire de masă rotativ T, ca și pentru o masă care se mișcă rectiliniu, este proporțională cu pătratul vitezei sale liniare (circumferențiale):
Într-adevăr, în ambele cazuri masa T se mișcă cu aceeași viteză v. Singura diferență este că, în cazul mișcării rectilinie, nu apar tensiuni în corpul în mișcare, dar atunci când inelul se rotește (precum o curea, un lanț, orice conexiune plată masivă închisă), în el apar tensiuni care nu depind de raza inelului și sunt determinate de formula (3.3). În consecință, într-o masă care se mișcă rectiliniu este posibilă creșterea vitezei și a energiei cinetice la infinit (în cadrul mecanicii clasice). Într-o masă rotativă, în acest caz un inel, suntem strict limitați de rezistența materialului, iar atât energia cinetică, cât și stresul din material sunt proporționale cu pătratul vitezei periferice.
Dacă nu este un inel, ci un corp de altă formă? Va fi posibil să se acumuleze o energie cinetică mai mare cu aceeași rezistență a materialului? Pentru a analiza această problemă, cel mai convenabil este să exprimați energia și puterea prin indicatori specifici - intensitatea energetică specifică e = E/tși forța specifică x = ?/?. Apoi, pentru un volant sub forma unui inel rotativ:
Pentru volantele de alte forme, coeficientul k va lua valori diferite. De exemplu, pentru un disc cu o gaură centrală foarte mică va fi 0,3; pentru un disc fără gaură deloc - 0,6. Cea mai bună formă de volant pentru stocarea energiei cinetice este un disc de rezistență egală. De exemplu, discurile turbinelor cu abur și gaz au această formă - groase în centru și subțiri la periferie.
3.6. Întrebare. Este posibil să se creeze un volant cu consum mare de energie cu un moment de inerție variabil?
Răspuns. Dispozitivul prezentat în fig. 6, în principiu, permite atât acumularea energiei cinetice, cât și modificarea momentului de inerție. Dar datorită rezistenței scăzute, un astfel de design va avea o intensitate energetică specifică neglijabilă. Dacă faceți un volant din cauciuc, atunci în timpul rotației momentul său de inerție va crește, cu atât viteza unghiulară a volantului este mai mare. În acest caz, la energia cinetică se va adăuga energia potențială acumulată în timpul întinderii cauciucului.
Dar interesul nu este în volantele cu o modificare „pasivă” a momentului de inerție, ci în cele în care acest indicator poate fi schimbat forțat. De ce ar putea fi nevoie de acest lucru?
Cu un moment unghiular constant al volantului, momentul de inerție poate fi crescut prin scăderea vitezei unghiulare și invers. Un exemplu este un bărbat cu gantere în mâini pe așa-numita platformă Jukovski - un disc montat pe un suport pe rulmenți (Fig. 12, a, b).

Orez. 12. Omul de pe platforma (banca) lui Jukovski: A– cu brațele întinse în lateral și un mare moment de inerție; b– cu mâinile deplasate spre centru și moment de inerție minim
Dacă o persoană, stând pe această platformă cu brațele întinse în lateral, se rotește (Fig. 12, a), atunci, aducând mâinile cu gantere în centru (Fig. 12, b), își reduce momentul de inerție, crescând astfel semnificativ viteza unghiulară. Volanele cu un moment de inerție variabil ajustabil ar putea oferi aproape orice viteză unghiulară necesară părții de lucru a mașinii, de exemplu, roțile unei mașini.
3.7. Întrebare. Ce consecințe pot rezulta din înlocuirea unui cadru de referință inerțial cu unul neinerțial, de exemplu, unul rotativ?
Răspuns. Fiecare mișcare relativă a unui corp dintr-un cadru de referință rotativ poate fi asociată cu mișcarea exact a aceluiași corp în raport cu un sistem de coordonate inerțiale. Dar pentru o astfel de corespondență este necesar să se reproducă nu numai acele forțe reale care au acționat asupra corpului original, ci și să se adauge noi forțe corespunzătoare forțelor de inerție Euler în mișcarea relativă a corpului original. Forțele de inerție Euler sunt definite aici ca forțe reale care acționează asupra unui corp, în ipoteza că un cadru de referință în mișcare este considerat convențional ca unul staționar. De exemplu, dacă luăm un autobuz de viraj ca unul staționar, atunci va trebui să considerăm forțele centrifuge care acționează pe viraj ca fiind reale.
Astfel, dacă conectăm sistemul de coordonate în mișcare cu Pământul, atunci accelerația unui punct de pe Pământ în sistemul „absolut” - accelerația reală - va fi suma vectorială a trei accelerații: relativă, portabilă și Coriolis (numită după mecanicul francez Gustav Coriolis din secolul al XIX-lea), care apare atunci când sistemul de coordonate în mișcare se rotește. Cu această accelerație Coriolis și cu forța Coriolis corespunzătoare încep să se întâmple „miracole”, similare cu cele care se întâmplă cu forțele inerțiale ale lui d’Alembert. Ele încep să fie considerate ca existente cu adevărat, li se atribuie acțiuni corespunzătoare etc.
Aici trebuie să ne amintim cu fermitate că atât forțele de transfer, cât și forțele Coriolis de inerție sunt forțe ireale, ele depind doar de alegerea sistemului de coordonate și nu reflectă interacțiunile unui punct dat cu alte puncte. Aceste forțe nu au o reacție pe care, conform celei de-a treia legi a lui Newton, fiecare forță trebuie să o aibă. Forțele inerției, oricare ar fi ele, sunt întotdeauna ireale; și nu îți vine să crezi, chiar dacă manualul spune că „acţionează” asupra a ceva (vezi întrebarea 3.3). Aceste forțe, în expresia figurativă a celebrului fizician Richard Feynman, sunt „pseudo-forțe”.
3.8. Întrebare. Este posibil să se definească forțele inerțiale Euler nu în mod formal, ci pe baza esenței fizice a fenomenelor?
Răspuns. Este posibil, deși va fi nevoie de puțină imaginație. Să luăm în considerare un corp auxiliar, complet identic cu cel principal. Lăsați acest corp auxiliar să efectueze exact aceleași mișcări în raport cu un sistem de coordonate „absolut” ales în mod arbitrar pe care le face corpul principal în raport cu sistemul de coordonate non-inerțial selectat. Astfel, aceleași forțe fizice acționează asupra tuturor punctelor corpului auxiliar ca și asupra corpului principal. Cu toate acestea, pentru ca mișcarea corpului auxiliar în raport cu sistemul de coordonate „absolut” să repete exact mișcarea corpului principal în raport cu sistemul de coordonate non-inerțial, este necesar să se aplice forțe suplimentare sistemului auxiliar, în pe lângă toate forțele fizice ale sistemului principal. Deoarece mișcarea este considerată în raport cu cadrul de referință „absolut”, inerțial, acestea pot fi doar forțe fizice. Evident, ele corespund exact forțelor inerțiale Euler.
Astfel, forțele de inerție Euler sunt egale cu acele forțe fizice care ar trebui adăugate la forțele fizice originale pentru a reproduce cu exactitate mișcarea relativă a oricărui corp ca mișcare absolută, adică într-un cadru de referință inerțial.
3.9. Întrebare. Dacă forțele inerțiale Coriolis sunt ireale, cum pot provoca eroziunea malurilor râurilor? Care este efectul giroscopic?
Răspuns. Eroziunea malurilor râurilor poate fi explicată calitativ fără utilizarea unui cadru de referință mobil, a forțelor de inerție Euler și a altor ipoteze.
Se știe că malurile drepte ale râurilor care curg în emisfera nordică sunt spălate. Să privim Pământul de sus de la Polul Nord. Să ne imaginăm pentru simplitate că râul, începând de la ecuator, curge direct spre nord, traversează Polul Nord și se termină tot la ecuator, dar pe cealaltă parte. Apa dintr-un râu la ecuator are aceeași viteză în direcția de la vest la est ca malurile sale (nu debitul râului, ci viteza apei împreună cu malurile și cu Pământul). Odată cu rotația zilnică a Pământului, aceasta este de aproximativ 0,5 km/s. Pe măsură ce te apropii de pol, viteza țărmurilor scade, iar la pol însuși este zero. Dar apa din râu „nu vrea” să-și reducă viteza - se supune legii inerției. Și această viteză este direcționată în direcția de rotație a Pământului - de la vest la est. Deci apa începe să „apasă” pe malul estic al râului, care se dovedește a fi pe partea dreaptă a curgerii. După ce a ajuns la pol, apa din râu își va pierde complet viteza în direcția „laterală”, deoarece polul este un punct staționar pe Pământ. Dar râul continuă să curgă acum spre sud, iar malurile lui se rotesc din nou de la vest la est cu o viteză din ce în ce mai mare pe măsură ce se apropie de ecuator. Malul de vest începe să „apasă” pe apa din râu, accelerând-o de la vest la est, iar apa, conform celei de-a treia legi a lui Newton, „apasă” pe acest mal, care se întâmplă să fie pe partea dreaptă a curgerii. .
În emisfera sudică se întâmplă invers. Dacă priviți Pământul de la Polul Sud, acesta se rotește într-o direcție diferită. Oricine are un glob poate verifica asta. Iată legea lui Baer, numită după naturalistul rus Karl Baer (1792–1876), care a observat această caracteristică a râurilor.
Și aici nu este departe de a explica efectul giroscopic în general. Să continuăm râul și să-l folosim pentru a descrie un cerc vicios de pe suprafața Pământului. În același timp, observăm că întreaga parte de nord a râului, situată în emisfera nordică, va tinde spre dreapta, iar toată partea de sud - spre stânga. Asta este toată explicația efectului giroscopic, care este considerat poate cel mai dificil din mecanica teoretică!
Deci, râul nostru este un inel imens sau volant, care se rotește în aceeași direcție cu curgerea râului. Dacă rotiți acest volant în direcția de rotație a Pământului, atunci întreaga sa parte de nord se va abate la dreapta, iar partea de sud se va abate la stânga (Fig. 13). Cu alte cuvinte, volantul se va roti astfel încât rotația sa să coincidă cu direcția de rotație a Pământului! Aceasta este o manifestare calitativă a efectului giroscopic.

Orez. 13. Schema de rotație a unui volant „înfășurat” în jurul Pământului.
3.10. Întrebare. Se spune că efectul giroscopic împiedică bicicleta să cadă. E chiar asa?
Efectul giroscopic este apariția unui moment în care se încearcă rotirea forțată a axei unui corp în rotație. Dar nu am determinat încă mărimea momentului giroscopic. La rotirea axei unei roți de bicicletă, acest moment este egal cu produsul dintre momentul de inerție al roții și vitezele unghiulare de rotație a acesteia și rotația axei (precesiune forțată). Pentru simplitate, decidem că masa roții este de 2 kg, raza acesteia este de 0,25 m și, prin urmare, momentul de inerție, aproximativ egal cu produsul masei cu pătratul razei, este egal cu 0,125 kg? m2. Un biciclist manevrează calm deja cu o viteză de 1 m/s, iar roata se rotește cu o viteză unghiulară de 4 rad/s. Viteza unghiulară de rotație a axei roții este de 20 de ori mai mică și este de aproximativ 0,2 rad/s. Ca rezultat, obținem un moment giroscopic egal cu 0,1 N?m. Este același lucru cu agățarea unei greutăți de 1 kg pe capătul unui cui care iese la doar 1 cm de perete.Este puțin probabil ca un moment atât de nesemnificativ să schimbe ceva în mișcarea bicicletei.
În același timp, un biciclist care călărește, care s-a întors la doar 10 cm de linie dreaptă, dacă nu se înclină spre viraj, va crea un moment de răsturnare egal cu greutatea sa plus aproximativ jumătate din greutatea bicicletei, înmulțită cu 0,1 m. , care atinge aproximativ 100 N?m. Acest moment este de o mie de ori mai mare decât momentul giroscopic! În acest fel, aplecându-se spre centrul virajului, biciclistul își menține stabilitatea.
Apropo, dacă vorbim de vehicule speciale „monorail” care mențin echilibrul tocmai datorită unui volant masiv și care se rotește rapid, atunci efectul giroscopic ajută cu adevărat aici. Prin producerea precesiei forțate (rotația axei) a volantului cu un moment cinetic mare, provoacă momente giroscopice uriașe care țin mașinile de mai multe tone în poziție verticală. De exemplu, cu un moment de inerție al volantului de 100 kgm2 (aceasta este aproximativ o roată dintr-un vagon feroviar de pasageri), o viteză unghiulară de 600 rad/s și aceeași precesie forțată ca înainte de 0,2 rad/s, momentul giroscopic va fi egal cu 12 kNm, ceea ce este echivalent cu o sarcină de 1,2 t suspendată pe un braț de 1 m. Un astfel de moment mare poate nu numai să stabilizeze un vehicul greu, ci și să distrugă rulmenții volantului care se rotesc rapid. Prin urmare, posibilitatea de apariție a momentelor giroscopice trebuie întotdeauna luată în considerare la calcularea rulmenților.
3.11. Întrebare. Dacă trageți un tun vertical în sus, va cădea obuzul înapoi în țeava tunului?
Răspuns. Această problemă a bântuit mecanica secolului al XIX-lea. Desigur, proiectilul va cădea înapoi în țeavă dacă totul se întâmplă într-un cadru de referință absolut. Dar în viața reală, adică pe un Pământ care se rotește, totul va fi diferit. De obicei, această problemă este luată în considerare cu trecerea la un cadru de referință rotativ, ceea ce o complică foarte mult, cel puțin în termeni matematici. Să încercăm aici să luăm în considerare doar latura calitativă a acestei probleme în cadrul inerțial de referință.
Să presupunem că, la latitudinea Moscovei, un punct masiv cade în vid dintr-un turn înalt de 100 m. Pământul se rotește de la vest la est, iar în momentul căderii sale acest punct avea o viteză circumferențială mai mare decât suprafața Pământului. , deoarece era mai departe de centrul său. În timpul căderii, punctul își păstrează viteza periferică și va intra în contact cu Pământul, deplasându-se spre viteza în exces, adică spre est. Calculele arată că această deplasare este mică - doar 1,2 cm.
Acum să tragem un proiectil punctual vertical în sus. În momentul împuşcăturii - pe suprafaţa Pământului - viteza periferică a punctului este mai mică decât la altitudine. Prin urmare, ridicându-se în sus, punctul se va abate spre vest. Punctul va petrece o perioadă deosebit de lungă în zona superioară a zborului său, deoarece viteza verticală este scăzută și, prin urmare, calea parcursă spre vest va fi destul de lungă. La întoarcere, punctul se va abate și spre vest, deși acum este din ce în ce mai lent. Astfel, va cădea la vest de botul tunului.
Apropo, înclinând țeava tunului puțin spre est, puteți, în principiu, să vă asigurați că proiectilul, atunci când cade, atinge din nou botul tunului; dar în realitate, mai ales ținând cont de influența atmosferei, acest lucru este imposibil de realizat - această sarcină este pur teoretică.
Desigur, întregul calcul ar putea fi efectuat cu precizie și fără utilizarea forțelor Coriolis fictive. Dar cei mai mulți experți în mecanică cred că prin plasarea pistolului nostru într-un sistem de coordonate relativ rotativ și introducerea forțelor Coriolis fictive, calculul poate fi efectuat mai scurt și mai simplu. Chiar dacă este așa, atunci nu am pierde principalul lucru - sentimentul realității a ceea ce se întâmplă, care joacă un rol important în fizică!
Noțiuni de bază.
Moment de putere relativ la axa de rotație - acesta este produsul vectorial dintre vectorul rază și forța.
Momentul forței este un vector , a cărei direcţie este determinată de regula vrîlului (şurubul din dreapta) în funcţie de direcţia forţei care acţionează asupra corpului. Momentul de forță este direcționat de-a lungul axei de rotație și nu are un punct de aplicare anume.
Valoare numerică a acestui vector este determinat de formula:
M=r×F× sina(1.15),
unde un - unghiul dintre vectorul rază și direcția forței.
Dacă a=0 sau p, moment de putere M=0, adică o forță care trece prin axa de rotație sau care coincide cu aceasta nu provoacă rotație.
Cel mai mare modul de cuplu este creat dacă forța acționează la un unghi a=p/2 (M > 0) sau a=3p/2 (M< 0).
Folosind conceptul de pârghie d- aceasta este o perpendiculară coborâtă de la centrul de rotație la linia de acțiune a forței), formula pentru momentul forței ia forma:
Unde ![]() (1.16)
(1.16)
Regula momentelor de forță(starea de echilibru a unui corp având o axă fixă de rotație):
Pentru ca un corp cu axa fixa de rotatie sa fie in echilibru, este necesar ca suma algebrica a momentelor fortelor care actioneaza asupra acestui corp sa fie egala cu zero.
S M i = 0(1.17)
Unitatea SI pentru momentul forței este [N×m]
În timpul mișcării de rotație, inerția unui corp depinde nu numai de masa sa, ci și de distribuția sa în spațiu față de axa de rotație.
Inerția în timpul rotației este caracterizată de momentul de inerție al corpului față de axa de rotație J.
Moment de inerție punctul material relativ la axa de rotație este o valoare egală cu produsul dintre masa punctului cu pătratul distanței sale față de axa de rotație:
J i =m i × r i 2(1.18)
Momentul de inerție al unui corp față de o axă este suma momentelor de inerție ale punctelor materiale care alcătuiesc corpul:
J=S m i × r i 2(1.19)
Momentul de inerție al unui corp depinde de masa și forma acestuia, precum și de alegerea axei de rotație. Pentru a determina momentul de inerție al unui corp față de o anumită axă, se folosește teorema Steiner-Huygens:
J=J0 +m× d2(1.20),
Unde J 0– moment de inerție în jurul unei axe paralele care trece prin centrul de masă al corpului, d– distanța dintre două axe paralele . Momentul de inerție în SI se măsoară în [kg × m 2 ]
Momentul de inerție în timpul mișcării de rotație a corpului uman este determinat experimental și calculat aproximativ folosind formulele pentru un cilindru, tijă rotundă sau bilă.
Momentul de inerție al unei persoane față de axa verticală de rotație, care trece prin centrul de masă (centrul de masă al corpului uman este situat în planul sagital ușor în fața celei de-a doua vertebre sacrale), în funcție de poziția persoanei, are următoarele valori: când stă în atenție - 1,2 kg × m 2; cu poziția „arabescă” – 8 kg × m 2; în poziție orizontală – 17 kg × m 2.
Lucrați în mișcare de rotație apare atunci când un corp se rotește sub influența forțelor externe.
Lucrul elementar al forței în mișcarea de rotație este egal cu produsul dintre momentul forței și unghiul elementar de rotație al corpului:
dA i =M i × dj(1.21)
Dacă asupra unui corp acționează mai multe forțe, atunci munca elementară a rezultantei tuturor forțelor aplicate este determinată de formula:
dA=M×dj(1.22),
Unde M– momentul total al tuturor forțelor externe care acționează asupra corpului.
Energia cinetică a unui corp în rotațieW la depinde de momentul de inerție al corpului și de viteza unghiulară de rotație a acestuia:
Unghiul de impuls (momentul unghiular) – o cantitate egală numeric cu produsul dintre impulsul corpului și raza de rotație.
L=p× r=m× V× r(1.24).
După transformările corespunzătoare, puteți scrie formula pentru determinarea momentului unghiular sub forma:
(1.25).
Momentul unghiular este un vector a cărui direcție este determinată de regula șurubului din dreapta. Unitatea SI a momentului unghiular este [kg×m 2 /s]
Legile de bază ale dinamicii mișcării de rotație.
Ecuația de bază pentru dinamica mișcării de rotație:
Accelerația unghiulară a unui corp aflat în mișcare de rotație este direct proporțională cu momentul total al tuturor forțelor externe și invers proporțională cu momentul de inerție al corpului.
(1.26).
Această ecuație joacă același rol în descrierea mișcării de rotație ca și a doua lege a lui Newton pentru mișcarea de translație. Din ecuație este clar că sub acțiunea forțelor externe, cu cât accelerația unghiulară este mai mare, cu atât este mai mic momentul de inerție al corpului.
A doua lege a lui Newton pentru dinamica mișcării de rotație poate fi scrisă sub altă formă:
(1.27),
acestea. prima derivată a momentului unghiular al unui corp în raport cu timpul este egală cu momentul total al tuturor forțelor externe care acționează asupra unui corp dat.
Legea conservării momentului unghiular al unui corp:
Dacă momentul total al tuturor forțelor externe care acționează asupra corpului este egal cu zero, i.e.
S M i = 0, Apoi dL/dt=0 (1.28).
Aceasta implică fie (1.29).
Această afirmație constituie esența legii conservării momentului unghiular al unui corp, care este formulată după cum urmează:
Momentul unghiular al unui corp rămâne constant dacă momentul total al forțelor externe care acționează asupra unui corp în rotație este zero.
Această lege este valabilă nu numai pentru un corp absolut rigid. Un exemplu este un patinator artistic care efectuează o rotație în jurul unei axe verticale. Prin apăsarea mâinilor, patinatorul reduce momentul de inerție și crește viteza unghiulară. Pentru a încetini rotația, el, dimpotrivă, își întinde larg brațele; Ca urmare, momentul de inerție crește și viteza unghiulară de rotație scade.
În concluzie, prezentăm un tabel comparativ al principalelor mărimi și legi care caracterizează dinamica mișcărilor de translație și rotație.
Tabelul 1.4.
| Mișcare înainte | Mișcare de rotație | ||
| Cantitate fizica | Formulă | Cantitate fizica | Formulă |
| Greutate | m | Moment de inerție | J=m×r 2 |
| Forta | F | Moment de putere | M=F×r, dacă |
| Impulsul corpului (cantitatea de mișcare) | p=m×V | Momentul unui corp | L=m×V×r; L=J×w |
| Energie kinetică | Energie kinetică | ||
| Munca mecanica | dA=FdS | Munca mecanica | dA=Mdj |
| Ecuația de bază a dinamicii mișcării de translație | Ecuația de bază pentru dinamica mișcării de rotație | , | |
| Legea conservării impulsului corpului |
sau | Legea conservării momentului unghiular al unui corp | sau SJ i w i =const, Dacă |
Centrifugarea.
Separarea sistemelor neomogene formate din particule de diferite densități poate fi efectuată sub influența gravitației și a forței Arhimede (forța de flotabilitate). Dacă există o suspensie apoasă de particule de diferite densități, atunci asupra lor acționează o forță netă
F r =F t – F A =r 1 ×V×g - r×V×g, adică
F r =(r 1 - r)× V ×g(1.30)
unde V este volumul particulei, r 1Și r– respectiv, densitatea substanței particulei și a apei. Dacă densitățile diferă ușor unele de altele, atunci forța rezultată este mică și separarea (depunerea) are loc destul de lent. Prin urmare, separarea forțată a particulelor este utilizată datorită rotației mediului separat.
Centrifugarea este procesul de separare (separare) a sistemelor, amestecurilor sau suspensiilor eterogene formate din particule de mase diferite, care se produce sub influența forței centrifuge de inerție.
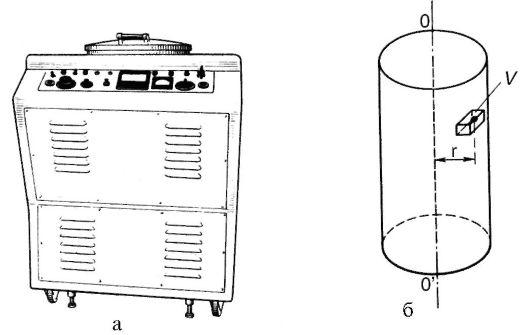
Baza centrifugei este un rotor cu cuiburi pentru eprubete, situat într-o carcasă închisă, care este antrenat de un motor electric. Când rotorul centrifugei se rotește cu o viteză suficient de mare, particulele suspendate de diferite mase, sub influența forței centrifuge de inerție, sunt distribuite în straturi la adâncimi diferite, iar cele mai grele sunt depuse la fundul eprubetei.
Se poate demonstra că forța sub influența căreia are loc separarea este determinată de formula:
![]() (1.31)
(1.31)
Unde w- viteza unghiulara de rotatie a centrifugei, r– distanta fata de axa de rotatie. Cu cât diferența dintre densitățile particulelor separate și a lichidului este mai mare, cu atât efectul centrifugării este mai mare și, de asemenea, depinde în mod semnificativ de viteza unghiulară de rotație.
Ultracentrifugele care funcționează la o viteză a rotorului de aproximativ 10 5 – 10 6 rotații pe minut sunt capabile să separe particulele cu dimensiunea mai mică de 100 nm, suspendate sau dizolvate într-un lichid. Ei au găsit o aplicare largă în cercetarea biomedicală.
Ultracentrifugarea poate fi folosită pentru a separa celulele în organele și macromolecule. În primul rând, părți mai mari (nuclei, citoschelet) se depun (sediment). Odată cu o creștere suplimentară a vitezei de centrifugare, particulele mai mici se depun secvențial - mai întâi mitocondriile, lizozomii, apoi microzomii și, în cele din urmă, ribozomii și macromoleculele mari. În timpul centrifugării, diferite fracțiuni se depun la viteze diferite, formând benzi separate în eprubetă care pot fi izolate și examinate. Extractele celulare fracționate (sisteme fără celule) sunt utilizate pe scară largă pentru a studia procesele intracelulare, de exemplu, pentru a studia biosinteza proteinelor și pentru a descifra codul genetic.
Pentru a steriliza piesele de mână în stomatologie, se folosește un sterilizator de ulei cu o centrifugă pentru a îndepărta excesul de ulei.
Centrifugarea poate fi folosită pentru a sedimenta particulele suspendate în urină; separarea elementelor formate din plasma sanguină; separarea biopolimerilor, virusurilor și structurilor subcelulare; controlul asupra purității medicamentului.
Sarcini pentru autocontrolul cunoștințelor.
Exercitiul 1 . Întrebări pentru autocontrol.
Care este diferența dintre mișcarea circulară uniformă și mișcarea liniară uniformă? În ce condiție se va mișca un corp uniform într-un cerc?
Explicați motivul pentru care mișcarea uniformă într-un cerc are loc cu accelerație.
Poate să apară mișcarea curbilinie fără accelerație?
În ce condiție momentul forței este egal cu zero? ia cea mai mare valoare?
Indicați limitele de aplicabilitate ale legii conservării momentului și a momentului unghiular.
Indicați caracteristicile separării sub influența gravitației.
De ce poate fi efectuată separarea proteinelor cu greutăți moleculare diferite prin centrifugare, dar metoda de distilare fracționată este inacceptabilă?
Sarcina 2 . Teste pentru autocontrol.
Completați cuvântul care lipsește:
O modificare a semnului vitezei unghiulare indică o modificare a mișcării de rotație _ _ _ _ _.
O modificare a semnului accelerației unghiulare indică o modificare a mișcării de rotație
Viteza unghiulară este egală cu _ _ _ _ _derivată a unghiului de rotație al vectorului rază în raport cu timpul.
Accelerația unghiulară este egală cu _ _ _ _ _ _derivată a unghiului de rotație a vectorului rază în raport cu timpul.
Momentul forței este egal cu_ _ _ _ _ dacă direcția forței care acționează asupra corpului coincide cu axa de rotație.
Găsiți răspunsul corect:
Momentul forței depinde numai de punctul de aplicare al forței.
Momentul de inerție al unui corp depinde doar de masa corpului.
Mișcarea circulară uniformă are loc fără accelerație.
A. Corect. B. Incorect.
Toate mărimile de mai sus sunt scalare, cu excepția
A. moment de forta;
B. lucru mecanic;
C. energie potenţială;
D. moment de inerţie.
Mărimile vectoriale sunt
A. viteza unghiulara;
B. accelerația unghiulară;
C. moment de forta;
D. moment unghiular.
Răspunsuri: 1 – direcții; 2 – caracter; 3 – primul; 4 – secunda; 5 – zero; 6 – B; 7 – B; 8 – B; 9 – A; 10 – A, B, C, D.
Sarcina 3. Obțineți relația dintre unitățile de măsură :
viteza liniară cm/min și m/s;
accelerația unghiulară rad/min 2 și rad/s 2 ;
momentul de forță kN×cm și N×m;
impulsul corporal g×cm/s și kg×m/s;
moment de inerție g×cm 2 și kg×m 2.
Sarcina 4. Sarcini cu conținut medical și biologic.
Sarcina nr. 1. De ce în timpul fazei de zbor a unei sărituri un atlet nu poate folosi nicio mișcare pentru a schimba traiectoria centrului de greutate al corpului? Mușchii atletului lucrează atunci când poziția părților corpului în spațiu se schimbă?
Răspuns: Deplasându-se în zbor liber de-a lungul unei parabole, un atlet poate schimba doar locația corpului și părțile sale individuale în raport cu centrul său de greutate, care în acest caz este centrul de rotație. Sportivul efectuează o muncă pentru a schimba energia cinetică de rotație a corpului.
Sarcina nr. 2. Ce putere medie dezvoltă o persoană când merge dacă durata pasului este de 0,5 s? Luați în considerare că munca este cheltuită pentru accelerarea și decelerarea extremităților inferioare. Mișcarea unghiulară a picioarelor este de aproximativ Dj=30 o. Momentul de inerție al membrului inferior este de 1,7 kg × m 2. Mișcarea picioarelor trebuie considerată ca rotație alternativă uniformă.
Soluţie:
1) Să scriem o scurtă condiție a problemei: Dt= 0,5s; DJ=30 0 =p/ 6; eu= 1,7 kg × m 2
2) Definiți munca într-un singur pas (picior drept și stâng): A= 2×Iw 2 / 2=Iw 2 .
Folosind formula vitezei unghiulare medii w av =Dj/Dt, primim: w= 2w av = 2×Dj/Dt; N=A/Dt= 4×I×(Dj) 2 /(Dt) 3
3) Înlocuiți valorile numerice: N=4× 1,7× (3,14) 2 /(0,5 3 × 36)=14,9(W)
Răspuns: 14,9 W.
Sarcina nr. 3. Care este rolul mișcării brațului când mergeți?
Răspuns: Mișcarea picioarelor, deplasându-se în două plane paralele situate la o oarecare distanță unul de celălalt, creează un moment de forță care tinde să rotească corpul uman în jurul unei axe verticale. O persoană își balansează brațele „spre” mișcarea picioarelor, creând astfel un moment de forță al semnului opus.
Sarcina nr. 4. Unul dintre domeniile de îmbunătățire a burghiilor utilizate în stomatologie este creșterea vitezei de rotație a frezei. Viteza de rotație a vârfului de bor la burghiile cu picior este de 1500 rpm, la burghiile electrice staționare - 4000 rpm, la burghiile cu turbină - ajunge deja la 300.000 rpm. De ce sunt dezvoltate noi modificări ale burghiilor cu un număr mare de rotații pe unitatea de timp?
Răspuns: Dentina este de câteva mii de ori mai susceptibilă la durere decât pielea: există 1-2 puncte de durere la 1 mm de 2 piele și până la 30.000 la 1 mm de 2 dentine incisive. puncte dureroase. Creșterea numărului de rotații, potrivit fiziologilor, reduce durerea atunci când se tratează o cavitate carioasă.
Z sarcina 5 . Completați tabelele:
Tabelul nr. 1. Desenați o analogie între caracteristicile liniare și unghiulare ale mișcării de rotație și indicați relația dintre ele.
Tabelul nr. 2.
Sarcina 6. Completați cardul indicativ de acțiune:
| Misiuni principale | Directii | Răspunsuri |
| De ce în stadiul inițial Când execută o capotaie, gimnastul își îndoaie genunchii și îi apasă pe piept, iar la sfârșitul rotației își îndreaptă corpul? | Utilizați conceptul de moment unghiular și legea conservării momentului unghiular pentru a analiza procesul. | |
| Explicați de ce este atât de dificil să stați în vârful picioarelor (sau să țineți o sarcină grea)? | Luați în considerare condițiile de echilibru al forțelor și momentele acestora. | |
| Cum se va schimba accelerația unghiulară pe măsură ce crește momentul de inerție al corpului? | Analizați ecuația de bază a dinamicii mișcării de rotație. | |
| Cum depinde efectul centrifugării de diferența dintre densitățile lichidului și ale particulelor care sunt separate? | Luați în considerare forțele care acționează în timpul centrifugării și relațiile dintre ele |
Capitolul 2. Fundamentele biomecanicii.
Întrebări.
Pârghii și articulații în sistemul musculo-scheletic uman. Conceptul de grade de libertate.
Tipuri de contracție musculară. Mărimi fizice de bază care descriu contracțiile musculare.
Principii de reglare motrică la om.
Metode și instrumente de măsurare a caracteristicilor biomecanice.
2.1. Pârghii și articulații în sistemul musculo-scheletic uman.
Anatomia și fiziologia sistemului musculo-scheletic uman au următoarele caracteristici care trebuie luate în considerare în calculele biomecanice: mișcările corpului sunt determinate nu numai de forțele musculare, ci și de forțele de reacție externe, gravitația, forțele de inerție, precum și forțele elastice. și frecare; structura aparatului locomotor permite exclusiv mişcări de rotaţie. Folosind analiza lanțurilor cinematice, mișcările de translație pot fi reduse la mișcări de rotație în articulații; mișcările sunt controlate de un mecanism cibernetic foarte complex, astfel încât există o schimbare constantă a accelerației.
Sistemul musculo-scheletic uman este format din oase scheletice articulate între ele, de care mușchii sunt atașați în anumite puncte. Oasele scheletului acționează ca pârghii care au un punct de sprijin la articulații și sunt antrenate de forța de tracțiune generată de contracția musculară. Distinge trei tipuri de pârghie:
1) Pârghie la care acționează forța F si forta de rezistenta R aplicat pe laturile opuse ale fulcrului. Un exemplu de astfel de pârghie este craniul văzut în plan sagital.
2) O pârghie care are o forță activă F si forta de rezistenta R aplicat pe o parte a punctului de sprijin și forța F aplicat la capătul pârghiei și forța R- mai aproape de punct de sprijin. Această pârghie oferă un câștig în forță și o pierdere în distanță, de exemplu. este pârghie de putere. Un exemplu este acțiunea arcului piciorului la ridicarea pe jumătatea degetelor de la picioare, pârghiile regiunii maxilo-faciale (Fig. 2.1). Mișcările aparatului masticator sunt foarte complexe. La închiderea gurii, ridicarea maxilarului inferior din poziția de coborâre maximă în poziția de închidere completă a dinților acestuia cu dinții maxilarului superior se realizează prin mișcarea mușchilor care ridică maxilarul inferior. Acești mușchi acționează asupra maxilarului inferior ca o pârghie de al doilea fel cu un punct de sprijin în articulație (dând un câștig în puterea de mestecat).
3) O pârghie în care forța care acționează este aplicată mai aproape de punct de sprijin decât forța de rezistență. Această pârghie este maneta de viteză, deoarece dă o pierdere în forță, dar un câștig în mișcare. Un exemplu sunt oasele antebrațului.


Orez. 2.1. Pârghii ale regiunii maxilo-faciale și ale arcului piciorului.
Majoritatea oaselor scheletului sunt sub acțiunea mai multor mușchi, dezvoltând forțe în direcții diferite. Rezultatele lor se găsesc prin adunare geometrică conform regulii paralelogramului.
Oasele sistemului musculo-scheletic sunt conectate între ele la articulații sau articulații. Capetele oaselor care formează articulația sunt ținute împreună de capsula articulară care le închide strâns, precum și de ligamentele atașate de oase. Pentru a reduce frecarea, suprafețele de contact ale oaselor sunt acoperite cu cartilaj neted și există un strat subțire de lichid lipicios între ele.
Prima etapă a analizei biomecanice a proceselor motorii este determinarea cinematicii acestora. Pe baza unei astfel de analize se construiesc lanțuri cinematice abstracte, a căror mobilitate sau stabilitate poate fi verificată pe baza unor considerații geometrice. Există lanțuri cinematice închise și deschise formate din articulații și legături rigide situate între ele.
Starea unui punct material liber în spațiul tridimensional este dată de trei coordonate independente - x, y, z. Se numesc variabile independente care caracterizează starea unui sistem mecanic grade de libertate. Pentru sisteme mai complexe, numărul de grade de libertate poate fi mai mare. În general, numărul de grade de libertate determină nu numai numărul de variabile independente (care caracterizează starea unui sistem mecanic), ci și numărul de mișcări independente ale sistemului.
Numărul de grade libertatea este principala caracteristică mecanică a articulației, adică. defineste numărul de osii, în jurul căruia este posibilă rotația reciprocă a oaselor articulate. Este cauzată în principal de forma geometrică a suprafeței oaselor aflate în contact la nivelul articulației.
Numărul maxim de grade de libertate în articulații este de 3.
Exemple de articulații uniaxiale (plate) din corpul uman sunt articulațiile humero-ulnare, supracalcanee și falange. Ele permit doar flexia si extensia cu un singur grad de libertate. Astfel, ulna, cu ajutorul unei crestături semicirculare, acoperă o proeminență cilindrică pe humerus, care servește drept ax articulației. Mișcările în articulație sunt de flexie și extensie într-un plan perpendicular pe axa articulației.
Articulația încheieturii mâinii, în care are loc flexia și extensia, precum și aducția și abducția, poate fi clasificată ca articulații cu două grade de libertate.
Articulațiile cu trei grade de libertate (articulație spațială) includ șoldul și articulația scapulohumerală. De exemplu, la articulația scapulohumerală, capul în formă de bilă al humerusului se potrivește în cavitatea sferică a proeminenței scapulei. Mișcările în articulație sunt flexia și extensia (în plan sagital), aducția și abducția (în plan frontal) și rotația membrului în jurul axei longitudinale.
Lanțurile cinematice plate închise au un număr de grade de libertate f F, care se calculează după numărul de legături n in felul urmator:
Situația pentru lanțurile cinematice din spațiu este mai complexă. Aici relația este valabilă
![]() (2.2)
(2.2)
Unde f i - numărul de restricții de grade de libertate eu- link-ul.
În orice corp, puteți selecta axe a căror direcție în timpul rotației va fi menținută fără dispozitive speciale. Au un nume axele de rotație liberă
Când se observă mișcări complexe, cum ar fi mișcarea corpului uman (mers, alergare, sărituri etc.), pare dificil sau chiar imposibil să descrii mișcarea tuturor punctelor sale. Cu toate acestea, analizând astfel de mișcări, se poate observa că acestea constau din altele mai simple - mișcări de translație și rotație.
Mecanica mișcării de translație este cunoscută cititorului, așa că secțiunea începe cu o analiză a mișcării de rotație. Cea mai simplă este rotirea unui corp rigid în jurul unei axe fixe. Acest caz vă permite să vă familiarizați cu specificul, terminologia și legile mișcării de rotație.
5.1. CINEMATICA MIȘCĂRII DE ROTAȚIE A UNUI CORP ABSOLUT RIGID ÎN jurul unei axe fixe
Un corp absolut rigid este unul a cărui distanță între oricare două puncte este constantă.
Dimensiunile și forma unui corp absolut rigid nu se schimbă atunci când se mișcă.
Conceptul de „corp absolut rigid” este o abstractizare fizică, deoarece orice corp este capabil de deformare. Cu toate acestea, în multe cazuri deformarea poate fi neglijată.
Cel mai simplu caz de mișcare de rotație a unui corp absolut rigid este rotația în jurul unei axe fixe. Aceasta este o mișcare în care punctele corpului se mișcă în cercuri, ale căror centre se află pe o linie dreaptă, numită axa de rotație.
Se știe că în unele cazuri, pentru a caracteriza mișcarea unui corp, nu este necesară indicarea mișcării tuturor punctelor sale; deci, de exemplu, în mișcarea de translație este suficient să indicați mișcarea oricărui punct al corpului.
În timpul mișcării de rotație în jurul unei axe, punctele corpului se mișcă pe traiectorii diferite, dar în același timp, toate punctele și corpul însuși se rotesc în același unghi. Pentru caracteristicile de rotație
desenați într-un plan perpendicular pe axă un vector rază până la un anumit punct i(Fig. 5.1). Dependența de timp a unghiului α de rotație al vectorului rază în raport cu o direcție selectată OX este ecuația mișcării de rotație a unui corp rigid în jurul unei axe fixe:
Viteza de rotație a unui corp este caracterizată printr-o viteză unghiulară egală cu prima derivată a unghiului de rotație al vectorului rază în raport cu timpul:
Viteza unghiulară este un vector care este direcționat de-a lungul axei de rotație și este legată de direcția de rotație prin regula șurubului din dreapta (Fig. 5.2). Vectorul viteză unghiulară, spre deosebire de vectorii viteză și forță, alunecă: nu are un anumit punct de aplicare și poate fi localizat oriunde pe axa de rotație. Astfel, specificarea vectorului ω indică poziția axei de rotație, direcția de rotație și mărimea vitezei unghiulare.

Rata de modificare a vitezei unghiulare este caracterizată de accelerația unghiulară egală cu derivata întâi a vitezei unghiulare în raport cu timpul:
sau sub formă vectorială:
Din (5.4) este clar că vectorul accelerație unghiulară coincide în direcție cu o modificare elementară, destul de mică, a vectorului viteză unghiulară dω: cu rotație accelerată, accelerația unghiulară este direcționată în aceeași direcție cu viteza unghiulară, cu rotație lentă - în sens opus.
Deoarece deplasarea unghiulară a tuturor punctelor unui corp absolut rigid este aceeași, atunci, conform (5.2) și (5.3), toate punctele corpului au în același timp aceeași viteză unghiulară și aceeași accelerație unghiulară. Caracteristicile liniare - deplasarea, viteza, accelerația - sunt diferite pentru puncte diferite. Să indicăm în formă scalară relația, care poate fi derivată independent, dintre caracteristicile liniare și unghiulare pentru al-lea punct care se mișcă într-un cerc de rază. r i:

Orez. 5.3

În concluzie, prezentăm formulele pentru cinematica mișcării de rotație a unui corp rigid în jurul unei axe fixe, obținute prin integrarea expresiilor corespunzătoare:
ecuația mișcării uniforme de rotație[cm. (5.2)]:
dependența vitezei unghiulare de timp în mișcarea uniformă de rotație[cm. (5.3)]:
ecuația mișcării de rotație uniform alternativă[cm. (5.1) și (5.6)]:
Este util să comparăm aceste formule cu dependențe similare pentru mișcarea de translație.
5.2. NOȚIUNI DE BAZĂ. ECUAȚIA PENTRU DINAMICA MIȘCĂRII DE ROTAȚIE
Moment de putere _
Să la un moment dat i forță aplicată unui corp rigid F^, situat într-un plan perpendicular pe axa de rotație (fig. 5.4).
Momentul forței relativ la axa de rotație este produsul vectorial dintre vectorul rază al punctului i și forța:
Extindendu-l, puteți scrie:
Unde β - unghiul dintre vectori r iȘi F i . De la umărul forţei h i = r i sinβ (vezi Fig. 5.4), atunci
Dacă forța acționează la un anumit unghi α față de planul de rotație (Fig. 5.5), atunci ea poate fi descompusă în două componente. Unul dintre ele se află într-un plan perpendicular pe axa de rotație, iar celălalt este paralel cu această axă și nu afectează rotația corpului (în cazul real, acționează doar asupra rulmenților). În plus, vor fi luate în considerare doar forțele care se află în planul perpendicular pe axa de rotație.

Orez. 5.4

Orez. 5.5
Lucrați în mișcare de rotație
Lăsați sub acțiunea forței F i(vezi Fig. 5.4) corpul se rotește printr-un unghi dα suficient de mic. Să găsim munca făcută de această forță.
Expresia pentru munca de forta cunoscuta din liceu in acest caz trebuie scrisa astfel:

Asa de,
munca elementară a forței în mișcarea de rotație este egală cu produsul dintre momentul forței și unghiul elementar de rotație al corpului.
Dacă asupra unui corp acționează mai multe forțe, atunci munca elementară efectuată de toate acestea este determinată în mod similar cu (5.12):
Unde M- momentul total al tuturor fortelor externe care actioneaza asupra corpului.
Dacă, atunci când corpul se rotește, poziția vectorului rază se schimbă de la α 1 la α 2, atunci munca forțelor externe poate fi găsită prin integrarea expresiei (5.13):
Moment de inerție
Măsura inerției corpurilor în timpul mișcării de translație este masa. Inerția corpurilor în timpul mișcării de rotație depinde nu numai de masă, ci și de distribuția acesteia în spațiu față de axă. Măsura inerției unui corp în timpul rotației este caracterizată de momentul de inerție al corpului față de axa de rotație. Să subliniem mai întâi că
Momentul de inerție al unui punct material față de axa de rotație este o valoare egală cu produsul dintre masa punctului și pătratul distanței acestuia față de axă:
Momentul de inerție al unui corp față de o axă este suma momentelor de inerție ale tuturor punctelor materiale care alcătuiesc corpul:


Ca exemplu, derivăm formula momentul de inerție al unei tije omogene subțiri lungime l si masa T faţă de axa perpendiculară pe tijă şi trecând prin mijlocul acesteia (Fig. 5.6). Să alegem o secțiune suficient de mică a tijei cu o lungime dx si masa dm, distanțat de axa 00" cu o distanță X. Datorită micimii acestei zone, poate fi luată ca punct material, momentul său de inerție [vezi. (5.15)] este egal cu:
Masa unei secțiuni elementare este egală cu produsul densității liniare t/l,înmulțit cu lungimea secțiunii elementare: dm= (m/l) dx Substituind această expresie în (5.18), obținem
Pentru a afla momentul de inerție al întregii tije, integrăm expresia (5.19) peste întreaga tijă, i.e. variind de la -1/2 la +1/2:

Să prezentăm expresii pentru momentele de inerție ale diferitelor corpuri de masă simetrice T:
cilindru gol omogen(cerc) cu raza interioară rși externă R raportat la axa OO”, care coincide cu axa geometrică a cilindrului (Fig. 5.7):
continuu omogen cilindru (r = 0) sau disc [vezi (5.21)]:
minge omogenă față de o axă care trece prin centrul ei:
paralelipiped dreptunghiular raportat la axa OO" care trece prin centrul acesteia perpendicular pe planul bazei (Fig. 5.8):
În toate exemplele de mai sus, axa de rotație trece prin centrul de masă al corpului. Când rezolvați probleme pentru a determina momentul de inerție al unui corp în jurul unei axe care nu trece prin centrul de masă, puteți utiliza teorema lui Huygens. Conform acestei teoreme, momentul de inerție al corpului față de o axă OO":
unde J 0 este momentul de inerție în jurul unei axe paralele care trece prin centrul de masă al corpului OO"; T- masa corpului; d- distanta dintre doua axe paralele (Fig. 5.9). Unitatea de măsură a momentului de inerție este kilogram metru pătrat(kg-m2).

Impuls
moment de impuls(impuls unghiular)un punct material care se rotește în jurul unei anumite axe se numește valoare egală cu produsul impulsului punctului aflat la distanța sa de axa de rotație:
Momentul unghiular al unui corp care se rotește în jurul unei anumite axe este egal cu suma momentului unghiular al punctelor care alcătuiesc corpul:

Deoarece viteza unghiulară a tuturor punctelor unui corp rigid este aceeași, luând ω din semnul sumei [vezi. (5.29)], obținem:
(/ - momentul de inerție al corpului față de axă), sau sub formă vectorială:
Deci, momentul unghiular este egal cu produsul dintre momentul de inerție al unui punct și viteza unghiulară. Rezultă că direcțiile momentului unghiular și ale vectorilor viteză unghiulară coincid. Unitatea de măsură a momentului unghiular este kilogram-metru pătrat pe secundă(kg? m2? s -1).
Este util să comparăm formula (5.31) cu o formulă similară pentru impulsul în mișcarea de translație.
Energia cinetică a unui corp în rotație
Când un corp se rotește, energia sa cinetică constă din energiile cinetice ale punctelor individuale ale corpului. Pentru un solid:
Este util să comparați expresia (5.32) cu o expresie similară pentru mișcarea de translație.
Diferențiând (5.32), obținem o modificare elementară a energiei cinetice în mișcare de rotație:
Ecuația de bază pentru dinamica mișcării de rotație
Lăsați corpul rigid, asupra căruia a fost acționat de forțe externe, să se rotească printr-un unghi suficient de mic da. Să echivalăm munca elementară a tuturor forțelor externe în timpul unei astfel de rotații [vezi. (5.13)] la o modificare elementară a energiei cinetice [vezi. (5.33)]: M dα = Jω dω , de unde:

Asta e de bazăecuația dinamicii mișcării de rotație. Din (5.35) este clar că momentul de inerție caracterizează proprietățile inerțiale ale unui corp în mișcare de rotație: sub acțiunea forțelor externe, accelerația unghiulară a corpului este mai mare, cu atât este mai mic momentul de inerție al corpului.
Ecuația de bază pentru mișcarea de rotație joacă același rol ca a doua lege a lui Newton pentru mișcarea de translație. Mărimile fizice incluse în această ecuație sunt analoge cu forța, masa și respectiv accelerația.
Din (5.34) rezultă că:
Derivata momentului unghiular al unui corp în raport cu timpul este egală cu momentul rezultant al tuturor forțelor externe.
Dependența accelerației unghiulare de momentul de forță și momentul de inerție poate fi demonstrată cu

cu puterea dispozitivului prezentat în Fig. 5.10. Sub sarcină 1, suspendată pe un fir aruncat peste un bloc, crucea se rotește rapid. Greutăți în mișcare 2 la diferite distanțe față de axa de rotație, puteți modifica momentul de inerție al traversei. Schimbarea sarcinilor, de ex. momentele de forță, și momentul de inerție, se poate verifica că accelerația unghiulară crește odată cu creșterea momentului de forță sau cu o scădere a momentului de inerție.
5.3. LEGEA CONSERVĂRII MOMENTULUI
Să considerăm cazul special al mișcării de rotație, când momentul total al forțelor externe este zero. După cum se poate vedea din (5.37), dL/dt= 0 la M = 0, de unde
Această prevedere este cunoscută ca legea conservării momentului unghiular: dacă momentul total al tuturor forțelor externe care acționează asupra unui corp este zero, atunci momentul unghiular al acestui corp rămâne constant.
Omițând demonstrația, observăm că legea conservării momentului unghiular este valabilă nu numai pentru un corp absolut rigid.
Cele mai interesante aplicații ale acestei legi sunt asociate cu rotația unui sistem de corpuri în jurul unei axe comune. În acest caz, este necesar să se țină cont de natura vectorială a momentului unghiular și a vitezelor unghiulare. Deci, pentru un sistem format din N corpuri care se rotesc în jurul unei axe comune, legea conservării momentului unghiular poate fi scrisă sub forma:
Să ne uităm la câteva exemple care ilustrează această lege.
O gimnastă care efectuează o capotă (Fig. 5.11) în faza inițială își îndoaie genunchii și îi apasă pe piept, reducând astfel momentul de inerție și mărind viteza unghiulară de rotație în jurul unei axe orizontale care trece prin centrul de masă. La sfârșitul săriturii, corpul se îndreaptă, momentul de inerție crește, iar viteza unghiulară scade. Un patinator care efectuează o rotație în jurul unei axe verticale (Fig. 5.12) la începutul rotației își aduce mâinile mai aproape de corp, reducând astfel momentul de inerție și mărind viteza unghiulară. La sfarsitul rotatiei are loc procesul invers: la miscarea bratelor, momentul de inertie creste si viteza unghiulara scade, ceea ce face usor oprirea.

Același fenomen poate fi demonstrat pe o bancă Jukovsky, care este o platformă orizontală ușoară care se rotește cu frecare scăzută în jurul unei axe verticale. Când poziția mâinilor se schimbă, momentul de inerție și viteza unghiulară se modifică (Fig. 5.13), momentul unghiular rămâne constant. Pentru a spori efectul demonstrativ, există gantere în mâinile unei persoane. Pe banca Jukovski puteți demonstra natura vectorială a legii conservării momentului unghiular.
Experimentatorul, stând pe o bancă staționară, primește de la un asistent o roată de bicicletă care se rotește în jurul unei axe verticale (fig. 5.14, stânga). În acest caz, momentul unghiular al sistemului persoană și platformă-roată este determinat doar de momentul unghiular al roții:
aici J h este momentul de inerție al persoanei și al platformei; J K și ω κ - momentul de inerție și viteza unghiulară a roții. Deoarece momentul forțelor externe față de axa verticală este zero, atunci L se păstrează (L = const).
Dacă experimentatorul rotește axa de rotație a roții cu 180° (Fig. 5.14, dreapta), atunci momentul unghiular al roții va fi direcționat opus celui original și egal cu J K ω K. Deoarece vectorul momentului unghiular al roții se modifică și se păstrează momentul unghiular al sistemului, momentul unghiular al persoanei și al platformei trebuie să se schimbe inevitabil; nu va mai fi egal cu zero 1 . Momentul unghiular al sistemului în acest caz
1 O ușoară discrepanță între axa roții și axa de rotație a platformei poate fi neglijată.



Folosind formula (5.42), este posibil să se estimeze aproximativ momentul de inerție al corpului uman împreună cu platforma, pentru care este necesar să se măsoare ω κ, ω 4 și să se găsească J k. Metoda de măsurare a vitezelor unghiulare de rotație uniformă este cunoscută cititorului. Cunoscând masa roții și presupunând că masa este distribuită în principal de-a lungul jantei, folosind formula (5.22) putem determina J k. Pentru a reduce eroarea, puteți face janta unei roți de bicicletă mai grea punând pe ea anvelope speciale. Persoana trebuie poziționată simetric față de axa de rotație.
O versiune mai simplă a demonstrației luate în considerare este aceea că o persoană care stă pe o bancă Jukovski rotește ea însăși o roată, pe care o ține pe o axă verticală. În acest caz, persoana și platforma încep să se rotească în direcții opuse (Fig. 5.15).
5.4. CONCEPTUL DE AXE LIBERE DE ROTARE
Un corp care se rotește în jurul unei axe fixe acționează în general asupra rulmenților sau a altor dispozitive care mențin constantă poziția acelei axe. La viteze unghiulare mari și momente de inerție, aceste efecte pot fi semnificative. Cu toate acestea, în orice corp este posibilă selectarea axelor a căror direcție în timpul rotației va fi menținută fără dispozitive speciale. Pentru a înțelege ce condiție trebuie să îndeplinească alegerea unor astfel de axe, luați în considerare următorul exemplu.

Comparând (5.43) cu coordonatele centrului de masă, observăm că forțele care acționează asupra axei sunt echilibrate dacă axa de rotație trece prin centrul de masă.
Astfel, dacă axa de rotație trece perpendicular pe tijă prin centrul de masă, atunci nu va exista niciun impact asupra acestei axe din partea corpului rotativ. Dacă rulmenții sunt îndepărtați, axa de rotație va începe să se miște, păstrându-și poziția în spațiu neschimbată, iar corpul va continua să se rotească în jurul acestei axe.
Axele de rotație care își mențin direcția în spațiu fără fixare specială se numesc libere. Exemple de astfel de axe sunt axele de rotație ale Pământului și vârfului, axa oricărui corp aruncat și care se rotește liber etc.
Un corp de formă arbitrară are întotdeauna cel puțin trei axe reciproc perpendiculare care trec prin centrul de masă, care pot fi axe de rotație libere. Aceste axe sunt numite axe principale de inerție. Deși toate cele trei axe principale de inerție sunt libere, cea mai stabilă rotație va fi în jurul axei cu cel mai mare moment de inerție. Faptul este că, ca urmare a acțiunii inevitabile a forțelor externe, cum ar fi frecarea, și, de asemenea, datorită faptului că este dificil să se stabilească rotația exact în jurul unei anumite axe, rotația în jurul axelor libere rămase este instabilă.
În unele cazuri, atunci când un corp se rotește în jurul unei axe libere cu un mic moment de inerție, el însuși schimbă această axă în axa cu cel mai mare moment.
Acest fenomen este demonstrat de următorul experiment. O tijă cilindrică este suspendată de motorul electric printr-un filet, care se poate roti în jurul axei sale geometrice (Fig. 5.17, a). Moment de inerție față de această axă J1 = mR2/2. La o viteză unghiulară suficient de mare, bastonul își va schimba poziția (Fig. 5.17, b). Momentul de inerție relativ la noua axă este egal cu J2 = ml 2/12. Dacă l 2 > 6R 2, atunci J 2 > J 1. Rotația în jurul noii axe va fi stabilă.
Cititorul poate verifica independent din experiență că rotația unei cutii de chibrituri aruncate este stabilă în raport cu o axă care rulează perpendicular pe fața mai mare și instabilă sau mai puțin stabilă în raport cu axele care rulează perpendicular pe alte fețe (vezi Fig. 5.8).
Rotația animalelor și a oamenilor în zborul liber și în timpul diferitelor sărituri are loc în jurul axelor libere cu cel mai mare sau cel mai mic moment de inerție. Deoarece poziția centrului de masă depinde de postura corpului, vor exista diferite axe libere pentru diferite posturi.

5.5. CONCEPTUL DE GRADE DE LIBERTATE
Poziția unui punct material liber în spațiu este dată de trei coordonate independente: x, y, z. Dacă punctul nu este liber, dar se mișcă, de exemplu, de-a lungul unei suprafețe, atunci nu toate cele trei coordonate vor fi independente.

Variabilele independente care caracterizează poziția unui sistem mecanic se numesc grade de libertate.
Un punct material liber are trei grade de libertate, în exemplul considerat - două grade de libertate. Deoarece o moleculă de gaz monoatomic poate fi considerată un punct material, prin urmare, o astfel de moleculă liberă are și trei grade de libertate.
Mai multe exemple.
Două puncte de material 1 și 2 sunt conectate rigid între ele. Poziția ambelor puncte este specificată de șase coordonate x 1, y 1, z 1, x 2, y 2, z 2, care sunt supuse unei singure constrângeri și unei conexiuni, exprimate matematic sub forma unei ecuații:
Din punct de vedere fizic, aceasta înseamnă că distanța dintre punctele materiale este întotdeauna l.În acest caz, numărul de grade de libertate este 5. Exemplul luat în considerare este un model al unei molecule diatomice.
Trei puncte de material 1, 2 și 3 sunt conectate rigid între ele. prieten. Nouă coordonate caracterizează poziția unui astfel de sistem: x 1 , y 1 , z 1, x 2 , y 2 , z2, x 3 y 3 , z 3 . Cu toate acestea, trei conexiuni între puncte determină independența doar a șase coordonate. Sistemul are șase grade de libertate. Deoarece poziția a trei puncte care nu se află pe aceeași linie dreaptă determină în mod unic poziția unui corp rigid, corpul rigid are șase grade de libertate.
Moleculele triatomice și poliatomice au același număr de grade de libertate (șase), dacă aceste molecule sunt considerate formațiuni rigide.
1 Dacă se obține o valoare imaginară pentru coordonata dependentă din (5.44), aceasta înseamnă că coordonatele independente selectate nu corespund niciunui punct situat pe o sferă cu o rază dată.
În moleculele poliatomice reale, atomii sunt în mișcare vibrațională, astfel încât numărul de grade de libertate ale unor astfel de molecule este mai mare de șase.
Numărul de grade de libertate determină nu numai numărul de variabile independente care caracterizează poziția sistemului mecanic, ci și, ceea ce este foarte important, numărul de mișcări independente ale sistemului. Astfel, trei grade de libertate ale unui punct material liber înseamnă că orice mișcare a punctului poate fi descompusă în mișcări independente de-a lungul a trei axe de coordonate. Deoarece un punct nu are dimensiuni, nu are sens să vorbim despre rotația lui. Deci, un punct material are trei grade de libertate de mișcare de translație. Un punct material de pe un plan, sferă sau altă suprafață are două grade de libertate de mișcare de translație. Mișcarea unui punct material de-a lungul unei curbe (un exemplu convențional este mișcarea unui tren pe șine) corespunde unui grad de libertate de mișcare de translație.
Un corp rigid care se rotește în jurul unei axe fixe are un grad de libertate de mișcare de rotație. Roata trenului are două grade de libertate: unul este mișcarea de rotație, iar celălalt este de translație (deplasarea axei roții de-a lungul șinei). Șase grade de libertate ale unui corp rigid înseamnă că orice mișcare a acestui corp poate fi descompusă în componente: mișcarea centrului de masă este descompusă în trei mișcări de translație de-a lungul axelor de coordonate, iar rotația constă în trei rotații mai simple în jurul axelor de coordonate. trecând prin centrul de masă.
În fig. 5.18-5.20 arată articulațiile balamale corespunzătoare unui, două și trei grade de libertate.

Orez. 5.18

Orez. 5.19
Orez. 5.20
5.6. CENTRIFUGARE
Centrifugarea este procesul de separare (separare) a sistemelor eterogene, de exemplu, particulele din lichidele în care se află, datorită rotației lor.
Să luăm în considerare separarea sistemelor neomogene într-un câmp gravitațional. Să presupunem că există o suspensie apoasă de particule de densități diferite. În timp, datorită acțiunii gravitației și a forței de plutire F A Are loc separarea particulelor: particule cu o densitate mai mare decât cea a chiuvetei de apă, particule cu o densitate mai mică decât cea a plutitorului de apă. Forța rezultantă care acționează, de exemplu, asupra unei particule individuale mai dense este egală cu:
Unde ρ 1 - densitatea particulelor de materie; ρ - densitatea apei; V- volumul particulelor.
Dacă valorile lui ρ 1 și ρ diferă puțin unele de altele, atunci forța Fp este mic și separarea (depunerea) are loc destul de lent. Într-o centrifugă (separator), o astfel de separare se realizează forțat prin rotirea mediului separat.
Să luăm în considerare fizica acestui fenomen.
Fie ca volumul de lucru al centrifugei (Fig. 5.21: a - aspect; b - diagrama volumului de lucru) să fie complet ocupat de un lichid omogen. Să selectăm mental un volum mic V a acestui lichid situat la distanta r de pe axa de rotație OO". Cu rotația uniformă a centrifugei, pe lângă forța gravitațională și de flotabilitate, care se echilibrează între ele, asupra volumului selectat acționează o forță centripetă. Aceasta este forța din lichidul care înconjoară volumul. Este îndreptată în mod natural către axa de rotație și este egală cu:
Unde ρ este densitatea lichidului.
Să presupunem acum că volumul alocat V este o particulă separată a cărei densitate de substanță este ρ 1 (ρ 1 Φ ρ). Forța care acționează asupra particulei din lichidul înconjurător nu se va modifica, așa cum se poate vedea din formula (5.45).
Pentru ca o particulă să se rotească cu lichidul, ea trebuie să fie acționată de o forță centripetă egală cu:
Unde m 1 este masa particulei, iar ρ 1 este densitatea corespunzătoare.
Orez. 5.21
Dacă F> F 1, apoi particula se deplasează spre axa de rotație. Dacă F< F 1, atunci impactul asupra particulei din lichid nu va fi suficient pentru a o menține pe o traiectorie circulară, iar particula va începe să se miște la periferie prin inerție. Efectul de separare este determinat de forța în exces F, care acționează din partea lichidului asupra particulei selectate, deasupra valorii forței centripete F 1, care determină mișcarea circulară:
Această expresie arată că efectul centrifugării este mai mare, cu atât diferența dintre densitățile particulelor separate și a lichidului este mai mare și, de asemenea, depinde în mod semnificativ de viteza unghiulară de rotație 1.
Să comparăm separarea prin centrifugare cu separarea prin gravitație:

1 Gravitația și forța de plutire nu sunt luate în considerare la derivarea formulei (5.47), deoarece acestea sunt direcționate de-a lungul axei de rotație și nu au un efect fundamental asupra centrifugării.
Ultracentrifugele sunt capabile să separe particulele mai mici de 100 nm, suspendate sau dizolvate în lichid. Ei au găsit o aplicație largă în cercetarea biomedicală pentru separarea biopolimerilor, virușilor și particulelor subcelulare.
Viteza de separare este deosebit de importantă în cercetarea biologică și biofizică, deoarece în timp starea obiectelor studiate se poate schimba semnificativ.
Să presupunem că corpul rigid A (Fig. 1.19, a) se poate roti în jurul unei axe fixe. Pentru a provoca rotația unui corp (pentru a-și schimba viteza unghiulară), este necesară o influență externă. Cu toate acestea, o forță a cărei direcție trece prin axa de rotație sau o forță paralelă cu axa nu poate modifica viteza unghiulară a corpurilor.

Prin urmare, din forța externă aplicată corpului, este necesară izolarea componentelor care nu provoacă rotație. Rotația poate fi cauzată numai de o forță (forța de rotație) situată într-un plan perpendicular pe axa de rotație și îndreptată tangențial la cercul descris de punctul de aplicare a acestuia.
Rețineți că atunci când corpul se rotește, componentele nu efectuează lucru, deoarece punctul de aplicare al acestor forțe se mișcă perpendicular pe direcțiile lor. Munca este efectuată numai de forța de rotație; este proiecția forței care acționează asupra corpului pe direcția de mișcare a punctului de aplicare a acestei forțe.
Să determinăm cantitatea de lucru efectuată de forța de rotație dacă punctul său de aplicare se mișcă de-a lungul unui cerc de rază cu (Fig. 1.19, b). Să presupunem că mărimea forței rămâne constantă. Apoi
Produsul unei forțe de rotație și o rază este momentul forței de rotație sau cuplul care acționează asupra unui corp dat și este notat cu (amintim că momentul unei forțe date relativ la orice axă este produsul acestei forțe prin brațul său, adică de lungimea perpendicularei, efectuată de la specificat
axa faţă de direcţia forţei). Astfel, în formula (2.8)
prin urmare, munca efectuată de cuplul este egal cu produsul acestui moment și unghiul de rotație al corpului:
![]()
Dacă cuplul (forța sau brațul său) se modifică în timp, atunci munca efectuată este determinată ca sumă:

Cuplul forței de rotație este reprezentat ca un vector care coincide cu axa de rotație; orientarea pozitivă a acestui vector se alege în direcția în care s-ar deplasa șurubul drept rotit de acest moment.
Cuplul aplicat corpului îi conferă acestuia o oarecare accelerație unghiulară în funcție de direcțiile vectorilor pe care i-am ales; aceștia sunt orientați de-a lungul axei de rotație în aceeași direcție. Relația dintre mărimea cuplului și mărimea accelerației unghiulare transmise de acesta poate fi stabilită în două moduri:
a) putem folosi faptul că munca forței motrice este egală cu modificarea energiei cinetice a corpului căruia i se aplică această forță: Pentru un corp în rotație, conform formulelor (2.9) și (2.4), avem avea
![]()
Aici presupunem că momentul de inerție al corpului nu se modifică în timpul rotației. Împărțind această ecuație și reducând cu obținem
![]()
b) puteți profita de faptul că momentul forței de rotație este egal cu suma momentelor forțelor care imprimă accelerații tangenţiale componentelor individuale ale corpului; aceste forţe sunt egale, iar momentele lor sunt
Să înlocuim accelerațiile tangențiale cu accelerația unghiulară, care este aceeași pentru toate particulele unui corp în rotație (dacă corpul nu este deformat în timpul rotației): Atunci
Formula (2.12) exprimă legea de bază a dinamicii mișcării de rotație a corpurilor solide (nedeformabile), pentru care
accelerația unghiulară dobândită de un corp sub influența unui cuplu dat este direct proporțională cu mărimea acestui moment și invers proporțională cu momentul de inerție al corpului față de axa de rotație:
![]()
În formă vectorială, această lege este scrisă ca
Dacă un corp este deformat în timpul rotației, atunci momentul său de inerție față de axa de rotație se va modifica. Să ne imaginăm mental un corp rotativ format din multe părți elementare (punctuale); atunci deformarea întregului corp va însemna o modificare a distanțelor de la aceste părți ale corpului până la axa de rotație. Cu toate acestea, o modificare a distanței unei viteze unghiulare date de rotație co va fi însoțită de o modificare a vitezei liniare de mișcare a acestei particule și, prin urmare, a energiei sale cinetice. Astfel, la o viteză unghiulară constantă de rotație a corpului, o modificare a distanțelor (deci, o modificare a momentului de inerție al corpului) va fi însoțită de o modificare a energiei cinetice de rotație a întregului corp.
Din formula (2.4), dacă presupunem variabile, putem obține
Primul termen arată modificarea energiei cinetice a unui corp în rotație, care s-a produs numai datorită unei modificări a vitezei unghiulare de rotație (la un moment dat de inerție a corpului), iar al doilea termen arată modificarea energiei cinetice. , care s-a produs numai din cauza unei modificări a momentului de inerție a corpului (la o viteză unghiulară dată de rotație).
Cu toate acestea, atunci când distanța de la un corp punctual la axa de rotație se modifică, forțele interne care leagă acest corp de axa de rotație vor funcționa: negative dacă corpul se îndepărtează și pozitive dacă corpul se apropie de axa de rotație; acest lucru poate fi calculat dacă presupunem că forța care leagă particulele de axa de rotație este numeric egală cu forța centripetă:
Pentru întregul corp, format din multe particule cu mase, obținem
În cazul general, atunci când un cuplu extern acționează asupra unui corp, modificarea energiei cinetice trebuie echivalată cu suma a două lucrări: cuplul extern și forțele interne.La rotație accelerată, valorile vor avea semne pozitive, - negative
semn (deoarece particulele corpului se îndepărtează de axa de rotație); Apoi
![]()
Înlocuind aici valoarea din expresia (2.15) și înlocuind cu se obține
sau după reducere
Aceasta este o formă generală a legii de bază a mecanicii pentru corpurile care se rotesc în jurul unei axe fixe; este aplicabilă și pentru corpurile deformate. Când formula (2.16) se transformă în formula (2.14).
Rețineți că pentru corpurile deformate, o modificare a vitezei unghiulare de rotație este posibilă chiar și în absența unui cuplu extern. Într-adevăr, când - din formula (2.16) obținem:
În acest caz, viteza unghiulară de rotație se modifică numai din cauza unei modificări a momentului de inerție a corpului cauzată de forțele interne.

Într-adevăr, a învârtit caruselul - și s-a învârtit prin inerție. Dacă rulmenții carusel sunt buni, atunci acest lucru se poate face pentru o perioadă destul de lungă. Volanții moderni din dispozitivele de stocare a energiei se rotesc fără ajutorul unui motor mai mult de o săptămână. De ce nu rotirea prin inerție? În plus, dacă „ajuți” acest volant cu un motor, acesta se va roti cu o viteză unghiulară complet constantă. Poate fi numită rotație prin inerție?
Strict vorbind, nu. L-am criticat pe Galileo, care a considerat mișcarea unui punct dintr-un cerc ca fiind inerțială. Dar asta pentru că în acest caz o forță externă trebuie să acționeze în mod necesar asupra punctului. Și atunci mișcarea nu mai este inerțială.
Să facem ceva mai viclean - luați multe puncte situate într-un cerc, fixați-le mai strâns unul de celălalt și desfaceți-le. Deci avem un volant care se rotește, minte, fără aplicarea de forțe externe (nu îl atingem!). Să plasăm un astfel de volant în spațiul cosmic - nu va fi nevoie nici de un cardan, nici de un motor. Obiectul se rotește singur și nu necesită forță.
Răspundeți, colegii fizicieni: se mișcă prin inerție sau nu?
Întrebarea pare a fi pentru un elev de școală, dar mi-e teamă că va deveni o problemă și pentru un specialist în fizică.
Raspunde unul:
- Da, nu se mișcă deloc, centrul său de masă, care este situat pe axă, este nemișcat, prin urmare, volantul este nemișcat!
„Nu”, nu suntem de acord, „dar cum rămâne cu energia sa cinetică?” Poate un corp nemișcat să aibă o energie cinetică considerabilă?
Al doilea raspuns:
– Aceasta este mișcarea prin inerție, deoarece se produce fără nicio influență externă!
„Scuzați-mă”, vom obiecta, „dar o astfel de mișcare, conform primei legi a lui Newton, nu poate fi decât rectilinie și uniformă.” Poate că Newton nu a ținut cont de ceva?
Newton a luat în considerare totul, doar că întrebarea nu este atât de banală pe cât ar părea imediat.
Care este diferența dintre inerția liniară și cea de rotație?
După cum se știe, inerția sau inerția unui punct masiv depinde doar de masa acestuia. Masa este o măsură a inerției unui corp în timpul mișcării liniare. Aceasta înseamnă că, cu o astfel de mișcare, inerția nu este afectată de distribuția maselor în corp, iar acest corp poate fi luat în siguranță ca punct material (masiv). Masa acestui punct este egală cu masa corpului și este situată în centrul de greutate sau, ceea ce este aproape același, în centrul de masă sau în centrul de inerție al corpului (prin urmare, „corp” în legile lui Newton este înlocuit pe bună dreptate cu un „punct material”).
Să realizăm următorul experiment. Să încercăm să rotim o tijă cu mase (greutăți) montate pe ea, de exemplu, bile metalice, în jurul unei axe verticale. Atâta timp cât aceste bile sunt aproape de centru, este ușor să rotești tija, inerția sa este scăzută. Dar dacă depărtăm masele până la marginile tijei, atunci va deveni mult mai dificil să desfaceți o astfel de tijă, deși masa ei rămâne neschimbată (Fig. 52). Prin urmare, inerția unui corp în timpul rotației depinde nu numai de masă, ci și (chiar într-o măsură mai mare) de distribuția acestor mase în raport cu axa de rotație. O măsură a inerției unui corp în timpul rotației este așa-numitul moment de inerție.
Orez. 52. Modificarea momentului de inerție a unui corp cu masa neschimbată: 1 – tijă; 2 – sarcina
Momentul de inerție al unui corp față de o axă dată este o mărime egală cu suma produselor maselor tuturor particulelor corpului cu pătratele distanțelor lor față de această axă.
Astfel, diferența de măsurare a inerției mișcării rectilinie și a rotației este că în primul caz este măsurată prin masă, iar în al doilea prin momentul de inerție.
Mai departe. După cum știm, legea inerției stabilește echivalența repausului relativ și a mișcării rectilinie uniforme - mișcarea prin inerție. Căci este imposibil de stabilit prin orice experiment mecanic dacă un corp dat este în repaus sau se mișcă uniform și în linie dreaptă. Nu este cazul în mișcarea de rotație. De exemplu, nu este deloc indiferent dacă vârful este în repaus sau se rotește uniform, cu o viteză unghiulară constantă. Viteza unghiulară a unui corp rigid este o mărime care îi caracterizează starea fizică. Viteza unghiulară poate fi determinată (de exemplu, prin măsurarea forțelor centripete) fără nicio informație despre poziția corpului în raport cu sistemul de coordonate „absolut”. Adică, chiar dacă întregul Univers dispare și rămâne doar corpul nostru în rotație, atunci în acest caz îi vom cunoaște viteza unghiulară. Prin urmare, termenul „viteza unghiulară absolută a unui corp”, în contrast cu „viteza absolută a unui punct”, ar trebui folosit în sens literal (fără ghilimele).
Astfel, fenomenele mecanice într-un sistem staționar și rotativ se vor desfășura diferit, ca să nu mai vorbim de faptul că căderea și mișcarea corpurilor într-un sistem rotativ se produc diferit față de un sistem staționar: se învârte suficient de bine și se va destrăma din cauza tensiunile care au apărut în ea.
Prin urmare, a doua diferență este că mișcarea rectilinie și repausul sunt echivalente, iar rotația, chiar și cu o viteză unghiulară constantă, poate fi separată clar nu numai de repaus, ci și de rotația cu o viteză unghiulară diferită.
Acestea sunt probabil toate diferențele principale. Restul este atât de același încât se poate lua libertatea de a formula, după imaginea și asemănarea legilor lui Newton, „legea” inerției a mișcării de rotație a unui corp absolut rigid: „Un corp absolut rigid izolat de momentele externe va menține o stare de repaus sau o rotație uniformă în jurul unui punct fix sau a unei axe până când momentele de forțe externe aplicate corpului îl forțează să schimbe această stare.”
De ce un corp absolut solid și nu orice corp? Pentru că un corp nerigid, din cauza deformațiilor forțate (sau predeterminate) în timpul rotației, își poate modifica momentul de inerție, iar aceasta este echivalentă cu o modificare a masei corpului în mișcare liniară. Nu menționăm acest caz când formulăm legea inerției, altfel ar începe așa: „Un punct material izolat de influențele exterioare. masa constanta...” Și acest punct își poate schimba cu ușurință masa. Un avion sau o rachetă, care se deplasează prin arderea combustibilului, își schimbă masa destul de semnificativ. Chiar și o persoană, care a parcurs o distanță suficientă, își schimbă masa atât de mult încât acest lucru este înregistrat de cântare medicale. Cum va afecta această modificare a masei inerția? La urma urmei, atunci când masa se schimbă, apare o forță suplimentară, așa-numita reactivă. Despre ce fel de mișcare prin inerție putem vorbi atunci când o forță acționează asupra unui corp?
Același lucru este valabil și în cazul mișcării de rotație: dacă momentul de inerție nu este constant, nu viteza unghiulară trebuie luată ca constantă, ci produsul dintre viteza unghiulară și momentul de inerție - so- numit moment cinetic. În acest caz, legea inerției va lua următoarea formă : „Un corp izolat de momentele externe în jurul axei de rotație va menține un moment cinetic constant în jurul acestei axe.” Această lege (într-o formulare ușor diferită) se numește legea conservării momentului unghiular.
Pentru a demonstra această lege, este convenabil să folosiți un dispozitiv simplu numit platformă Jukovski (bancă). Aceasta este o platformă orizontală rotundă pe rulmenți, care se poate roti în jurul unei axe verticale cu frecare scăzută (Fig. 53). Dacă o persoană, stând pe această platformă și rotindu-se cu o anumită viteză unghiulară, își întinde brațele în lateral (și mai bine cu încărcături în ele, de exemplu, gantere), atunci momentul său de inerție față de axa verticală va crește și viteza unghiulară va scădea semnificativ. Coborând mâinile, o persoană, printr-un efort intern, își transmite viteza unghiulară inițială. Chiar și în timp ce stați nemișcat pe platformă, vă puteți întoarce corpul în orice direcție rotind brațul întins în direcția opusă. Această metodă de schimbare a vitezei unghiulare este utilizată pe scară largă în balet, acrobație etc., chiar și pisicile aterizează cu succes pe labe, rotind coada în direcția corespunzătoare.
Orez. 53. Platforma Jukovski și omul
Numeroase dispozitive și mașini se bazează pe fenomenul de inerție a mișcării de rotație, în special, motoare inerțiale - baterii care stochează energia cinetică în timpul rotației inerțiale a volantului și dispozitive giroscopice care, la figurat vorbind, își păstrează momentul cinetic. Există și volante cu moment variabil de inerție, care amintesc de principiul acțiunii umane pe platforma Jukovski.
Forțele centrifuge sunt reale?
Știm deja că așa-numitele forțe inerțiale, pe care le adăugăm la forțele reale presupus pentru a face rezolvarea problemelor mai ușoară, nu există de fapt. Autorul a folosit cuvântul „presupus” pentru că uneori acest „relief” se transformă într-o astfel de greșeală, încât ar fi mai bine să nu se folosească deloc aceste forțe inerțiale. Mai ales acum, când computerele fac toată munca de calcul și aproape că nu le pasă dacă am făcut calculele mai ușoare sau nu.
Deci, pentru mișcarea de rotație, problema cu forțele inerțiale este mult mai complicată decât pentru mișcarea rectilinie. Iar consecințele greșelilor pot fi mai grave. Cât valorează forțele centrifuge notorii? Aproape fiecare dintre noi, inclusiv chiar și oamenii de știință, crede că astfel de forțe există și că ele acționează asupra unui punct sau corp de rotație. Și sunt foarte descurajați când află că nu există și nu pot exista.
Să dăm un exemplu simplu, dar totuși mortal pentru aceste forțe. Se știe că Luna se învârte în jurul Pământului. Întrebarea este, forțele centrifuge acționează asupra lui? Vă rugăm să vă întrebați prietenii, părinții și cunoștințele despre acest lucru. Majoritatea vor răspunde: „Ei acționează!” Apoi te cert cu ei orice vrei și începi să demonstrezi că acest lucru nu poate fi.
Există două argumente principale. În primul rând: dacă o forță centrifugă (adică o forță îndreptată spre exterior din centrul de rotație) a acționat asupra Lunii, atunci ea ar putea acționa doar de pe Pământ, deoarece nu există alte corpuri în apropiere. Cred că nu este nevoie să le reamintim oamenilor că forțele acționează numai asupra corpurilor din alte corpuri, și nu „doar așa”. Și dacă totul este așa, atunci înseamnă că Pământul nu atrage, ci respinge Luna - spre exterior de la sine. Între timp, după cum știm, există o lege a gravitației universale, nu a respingerii. Prin urmare, doar o singură forță poate acționa asupra Lunii de pe Pământ - atracția P, îndreptată exact în sens invers - de la Lună la Pământ. Această forță se numește centripetă și există cu adevărat; ea îndepărtează Luna din calea sa inerțială dreaptă și o face să se rotească în jurul Pământului. Dar, scuze, nu există forță centrifugă (Fig. 54).

Al doilea argument. Este pentru cei care nu știu despre existența legii gravitației universale sau au uitat-o. Apoi, dacă asupra Lunii ar acționa o forță centrifugă (în mod firesc, de pe Pământ, deoarece, așa cum știm deja, nu există alte corpuri în apropiere), atunci Luna nu s-ar roti în jurul Pământului, ci ar zbura. Dacă nu ar exista deloc forțe care să acționeze asupra Lunii, atunci aceasta ar zbura calm pe lângă Pământ prin inerție, adică în linie dreaptă (am uitat de gravitația universală!). Și dacă o forță centrifugă a acționat asupra Lunii de pe Pământ, atunci Luna, apropiindu-se de Pământ, s-ar întoarce în lateral și, sub influența acestei forțe, ar zbura pentru totdeauna în spațiul cosmic. Dacă am putea-o vedea! Dar din moment ce acest lucru nu se întâmplă, rezultă că nu există forță centrifugă. Ai câștigat argumentul, în orice caz. Și această forță centrifugă a apărut din același loc cu forțele inerțiale în mișcare liniară - din principiul lui d'Alembert. Aici, în mișcarea de rotație, acest principiu face rezolvarea problemelor chiar mai ușoară decât în mișcarea rectilinie. Desigur, aplicăm o forță centrifugă inexistentă forței centripete existente - și Luna pare să atârnă pe loc! Fă ce vrei cu el, determină accelerații, viteze, razele orbitale, perioadele orbitale și orice altceva. Deși toate acestea pot fi determinate fără a folosi principiul lui d'Alembert.
 Orez. 55. Derapajul mașinii la un viraj (diagrama poliției rutiere)
Orez. 55. Derapajul mașinii la un viraj (diagrama poliției rutiere)Dar Luna Luna, totul nu este nimic în comparație cu obținerea permisului de conducere la poliția rutieră. Autorul predă la catedra de automobile, unde toți studenții săi sunt obligați să obțină permis și toată lumea geme la fizica poliției rutiere. Ei se plâng că poliția rutieră le explică mișcarea unei mașini la virare astfel: „Din moment ce la întoarcerea unei mașini se acționează o forță de tracțiune îndreptată înainte de-a lungul unei tangente și o forță centrifugă care acționează spre exterior, mașina poate doar derapa. spre exterior din tangentă” (vezi diagrama din Fig. 55). Dar din moment ce în loc de forță centrifugă, asupra mașinii acționează o forță centripetă, îndreptată exact în sens invers, aceasta va purta mașina spre interior din tangentă! Cu excepția cazului în care, desigur, țineți cont de alte motive - alunecarea roții, răsturnarea, vânt transversal, impact lateral etc. Astfel, forța centrifugă, sau mai bine zis, luând-o în considerare în loc de forța centripetă, poate duce la un accident sau o accident, deoarece mașina se va mișca complet nu acolo unde ne așteptam.
Dacă asupra mașinii acționează vreo forță P, este doar din marginea drumului pe roți (aerul nu are nicio legătură, nu o luăm în calcul). Dacă această forță este centrifugă, atunci va îndoi anvelopele din centru spre exterior, iar dacă este centripetă, atunci, dimpotrivă, spre centru. Și orice inspector de poliție rutieră știe foarte bine că la întoarcere, anvelopele mașinii se înclină spre centru (Fig. 56). Aceasta înseamnă că forța P acționează în aceeași direcție și este centripetă. Câte accidente ar fi putut fi evitate dacă poliția rutieră nu ar fi „abuzat” de principiul d'Alembert!
 Orez. 56. Anvelopele se înclină spre centrul virajului la viraj
Orez. 56. Anvelopele se înclină spre centrul virajului la virajDar, de dragul corectitudinii, observăm în continuare că forțele centrifuge sau pur și simplu dirijate de la centru există încă, dar ele nu acționează deloc asupra corpului care se rotește, ci asupra conexiunii care ține acest corp (Fig. 57). Adică nu pe o mașină, ci pe un drum, nu pe Lună, ci pe Pământ, nu pe o piatră într-o praștie, ci pe o frânghie și mâna unei persoane etc.
 Orez. 57. Acţiunea forţelor centrifuge
Orez. 57. Acţiunea forţelor centrifugePoate apărea întrebarea: de ce o bicicletă cade în continuare în exterior în timpul unei viraj strânse dacă nu a avut timp să se aplece spre interior? De ce tramvaiele, trenurile și mașinile se răsturnează în afară când virează cu viteză mare? La urma urmei, nu există nicio forță centrifugă, deci ce împinge aceste mașini spre exterior când se întorc?
Să explicăm acest lucru folosind exemplul unei biciclete și, în același timp, va deveni clar de ce este atât de stabilă. Imaginează-ți o bicicletă care începe să se întoarcă (Fig. 58). Să ne uităm la asta de sus. Roțile încep să se „miște” spre centrul virajului, atrase de forța de frecare cu drumul, iar întregul vârf, inclusiv călărețul sau motociclistul în termeni moderni, tinde să-și continue drumul în linie dreaptă - conform la legea inerţiei. Ce se întâmplă? Roțile „se rostogolesc” de sub călăreț în lateral, iar acesta cade în lateral - în exterior de la viraj. Dar în niciun caz modul în care poliția rutieră o explică - nu în exterior de la tangentă la viraj, din traseul său drept anterior. Sau mai exact, undeva între cercul de rotație și această tangentă. Același efect al inerției explică stabilitatea bicicletei. De îndată ce începe să cadă într-o parte, ciclistul rotește în mod conștient sau automat volanul în direcția căderii și, parcă, „aduce” roțile în poziția de a se înclina.
 Orez. 58. O bicicletă care merge într-o viraj: a – vedere de sus; b – vedere frontală
Orez. 58. O bicicletă care merge într-o viraj: a – vedere de sus; b – vedere frontalăÎn același mod, și anume manifestarea inerției, aruncarea oamenilor în afară pe așa-numita „roată a râsului” sau „roata Feris”. Putem vorbi despre efectul centrifugal sau tendința centrifugă, datorită căruia oamenii, mașinile, bicicletele etc., care se deplasează în cerc, tind să se afle pe raza sa cea mai mare sau, după cum ni se pare, sunt aruncate în afară (Fig. 59). În mod firesc, au tendința de a se mișca în linie dreaptă (după legea inerției), iar o linie dreaptă este același cerc, dar cu o rază infinit de mare, evident mai mare decât raza oricărui cerc.
 Orez. 59. Oamenii de pe o roată care se învârt sunt aruncați pe marginile ei
Orez. 59. Oamenii de pe o roată care se învârt sunt aruncați pe marginile eiNumeroase alte atracții se bazează pe această proprietate - buclele „diavolului” sau „mort” (inventate în 1902 simultan de doi actori de circ - Johnson și Noisette) (Fig. 60), carusele înclinate, care sunt utilizate pe scară largă astăzi în divertismentul parcurilor, etc.
 Orez. 60. „Bucla diavolului” și o bicicletă pe ea
Orez. 60. „Bucla diavolului” și o bicicletă pe eaAcelași efect centrifugal este folosit pentru a crea așa-numita „gravitație artificială” și aspect modern cu privire la natura gravitației, în mod surprinzător, nu vede prea multe diferențe aici. (Pe cine este interesat de această întrebare destul de complexă, autorul se referă la cartea sa). Stațiile spațiale ar trebui să se rotească în jurul unei axe, astfel încât astronauții să se simtă confortabil, simțind greutatea aproape ca pe Pământ. Ceva similar se întâmplă cu plantele care sunt plantate pe interiorul unei roți care se rotește (Fig. 61). Semințele de fasole încolțite produc muguri care nu se grăbesc în sus, ca de obicei, ci spre centrul roții, adică în direcția celei artificiale.S-a demonstrat că pentru organismele vii gravitația este naturală sau artificială - nu are nicio diferență.
 Orez. 61. Tulpini de plante gravitaționale încolțite. îndreptată spre axă, rădăcinile spre exterior
Orez. 61. Tulpini de plante gravitaționale încolțite. îndreptată spre axă, rădăcinile spre exteriorPentru a fi mai precis, desigur că există o diferență. Cu gravitația naturală, corpurile sunt atrase într-un anumit punct, iar cu gravitația artificială, ele par să se „repeleze” de ea, așa cum se poate vedea din Fig. 61. Dar nu există nicio diferență fundamentală în termeni biologici.
Misterul turneului
Dar problema este complet confuză atunci când forțele inerțiale în timpul rotației nu sunt d’Alembert, ci euleriene. Cele care „apar” atunci când se folosește un cadru de referință rotativ. Adică atunci când încercăm să luăm un sistem rotativ pentru unul staționar și să aplicăm astfel de forțe inerțiale care ar menține totul la fel.
Amintiți-vă că o persoană merge într-un tramvai care se întoarce și veți înțelege cât de complexe trebuie să fie forțele pentru a arunca o persoană de pe cărare într-un tramvai staționar, în același mod în care i se va întâmpla într-un tramvai care se întoarce. Orice forțe Coriolis și momente giroscopice utilizate în acest caz sunt aceleași forțe inerțiale fictive, doar că mult mai complexe.
Să încercăm, ca exemplu, să explicăm de ce râurile care curg de-a lungul meridianului spală malurile drepte din emisfera nordică și malurile stângi din emisfera sudică. Acest lucru poate fi explicat simplu și clar fără forțe inerțiale și dificil cu ele, în special cele inexistente. Această proprietate a râurilor de a spăla diferite maluri din emisfere diferite se numește legea lui Baer, numită după geograful rus K. M. Baer, care a trăit în secolul al XIX-lea și a observat această caracteristică.
Pământul, după cum știm, se rotește de la vest la est. De aceea ni se pare că Soarele vine deasupra noastră de la est la vest. Deoarece Pământul se rotește, nu poate servi ca un cadru de referință inerțial (staționar) suficient de precis, deși adesea ne gândim la el ca atare. De aceea suntem surprinși de tot felul de fenomene neobișnuite care nu pot apărea într-un cadru de referință staționar.
Să privim Pământul de sus de la Polul Nord. Să ne imaginăm pentru simplitate că râul, începând de la ecuator, curge direct spre nord, traversează Polul Nord și se termină tot la ecuator, dar pe cealaltă parte. Apa dintr-un râu la ecuator are aceeași viteză în direcția de la vest la est (acesta nu este curgerea râului, aceasta este viteza lui împreună cu malurile și cu Pământul!), precum și malurile sale, care cu rotaţia zilnică a Pământului este de aproximativ 0,5 km/ Cu. Pe măsură ce te apropii de pol, viteza țărmurilor scade, iar la pol însuși este zero. Dar apa din râu „nu vrea” să-și reducă viteza - se supune legii inerției. Și această viteză este direcționată în direcția de rotație a Pământului, adică de la vest la est. Deci apa începe să „apasă” pe malul estic al râului, care se dovedește a fi pe partea dreaptă a curgerii. După ce a ajuns la pol, apa din râu își va pierde complet viteza în direcția „laterală”, „tangențială”, deoarece polul este un punct staționar pe Pământ. Dar acum râul continuă să curgă spre sud, iar malurile lui se rotesc din nou de la vest la est cu o viteză din ce în ce mai mare pe măsură ce se apropie de ecuator. Malul vestic începe să „apasă” pe apa râului, accelerând-o de la vest la est, iar apa, conform celei de-a treia legi a lui Newton, „apasă” pe acest mal, care din nou se dovedește a fi pe partea dreaptă a fluxul.
În emisfera sudică, totul se întâmplă invers, pentru că dacă priviți Pământul de la Polul Sud, atunci rotația lui va fi deja vizibilă într-o altă direcție - nu în sens invers acelor de ceasornic, ca de la Polul Nord, ci în sensul acelor de ceasornic. Oricine are un glob îl poate verifica.
Atât de legea berii!
Dar dacă încercăm să explicăm același lucru din punctul de vedere al mecanicii mișcării relative și al forțelor de inerție Euler, rezultatul ar fi dezastruos. Jumătate dintre cititori ar adormi, iar cealaltă jumătate ar face alte lucruri. Aici nu se poate face fără matematică și mecanică superioară, iar sensul fizic este complet pierdut. De aceea elevii percep și „procesează” acest material atât de prost. Dar pentru cazuri complexe, de exemplu teoria giroscoapelor, acest lucru nu poate fi evitat.
În același mod, numai folosind conceptul de inerție se poate explica un fenomen atât de complex precum efectul giroscopic, care explică, de exemplu, comportamentul misterios al unui vârf rotativ.
Să continuăm râul și să-l folosim pentru a descrie un cerc vicios în jurul Pământului. În același timp, vom observa că toată partea de nord a râului (în emisfera nordică) va tinde spre dreapta, iar toată partea de sud va tinde spre stânga. Asta este toată explicația efectului giroscopic, care este considerat poate cel mai dificil din mecanica teoretică!
Deci, râul nostru este un inel imens sau volant, care se rotește în aceeași direcție cu curgerea râului. Dacă rotiți acest volant în direcția de rotație a Pământului - în sens invers acelor de ceasornic, atunci întreaga sa parte de nord se va abate la dreapta, iar partea de sud - la stânga. Cu alte cuvinte, volantul se va roti astfel încât rotația sa să coincidă cu direcția de rotație a Pământului! Și semnificația fizică a acestui fenomen este deja clară luând în considerare legea lui Beer.
Este ușor să testați această afirmație cu un experiment, mai ales pentru cei care au o bicicletă. Ridicați roata din față a bicicletei de pe podea și accelerați-o în direcția de rotație a volantului nostru fluvial, adică în același mod în care se rotește atunci când bicicleta înaintează. Și apoi rotiți brusc ghidonul bicicletei în direcția de rotație a Pământului - adică în sens invers acelor de ceasornic. Și veți vedea că întreaga bicicletă se va înclina cu partea superioară spre dreapta, ceea ce trebuia dovedit (Fig. 62).
 Orez. 62. Verificarea momentului giroscopic pe o roată de bicicletă
Orez. 62. Verificarea momentului giroscopic pe o roată de bicicletăDacă nu aveți o bicicletă la îndemână și cel mai adesea acest lucru se întâmplă la serviciu și la școală, atunci vă puteți descurca cu o monedă sau orice roată care poate fi rulată pe masă. În același timp, veți vedea că oriunde moneda se înclină lateral, pierzându-se echilibrul, se va întoarce acolo în timp ce se rostogolește (Fig. 63). Această regulă remarcabilă, care poate fi reprodusă în orice moment, vă va ajuta să determinați comportamentul unei roți, volantului sau discului care se rotește în timpul virajelor forțate. Autorul însuși folosește doar această regulă în lucrarea sa și, credeți-mă, este mult mai simplă decât altele și o puteți verifica oricând.
 Orez. 63. Regula roții este că se rotește în aceeași direcție pe care parte tinde să cadă.
Orez. 63. Regula roții este că se rotește în aceeași direcție pe care parte tinde să cadă.Ei bine, acum este timpul să ne dăm seama cum are loc precesia - mișcarea în formă de con a unui vârf și a Pământului însuși, dacă doriți. Deci, râul nostru volant încearcă în mod constant să devieze Polul Nord al Pământului la dreapta; dar Pământul se învârte și astfel, deviând constant spre dreapta, Polul Nord începe să „scrie” un cerc. O blat se va comporta în același mod dacă o împingeți sau dacă îi perturbați echilibrul. Trebuie doar să știi că Pământul precesează nu din cauza râurilor (vom vorbi și despre asta!), ci din cauza atracției sale inegale (extra-centrale), în principal de către Soare. Axa de rotație a Pământului „se îndreaptă într-un cerc în jurul unui con”, a cărui generatoare este înclinată față de axa conului la un unghi de 0,41 rad, sau 23° 27 . Axa Pământului face o revoluție completă în jurul axei conului în 26 de mii de ani și, în mod natural, coordonatele stelelor, inclusiv cele fixate condiționat (de exemplu, Steaua Polară), se schimbă constant. Vechii egipteni, de exemplu, au văzut pe cer constelații pe care contemporanii lor nu le-au mai putut vedea.
Cum se determină direcția de precesie a oricărui corp rotativ - o roată, un vârf etc.? Da, conform aceleiași „reguli a roții” care a fost deja menționată. Deci, dacă orice corp în rotație este reprezentat sub forma unei roți care rulează, iar momentul perturbator este sub forma unui moment care tinde să răstoarne această roată pe o parte (care, de fapt, este ceea ce fac forțele gravitaționale!), atunci această roată se va întoarce în direcția căderii pe măsură ce se rostogolește. Adică, dacă roata cade la dreapta, atunci se va întoarce la dreapta. Această rotire a roții este precesiune și așa poate fi determinată direcția ei.
Este posibil un vehicul cu două roți?
Da, o mașină, exact o mașină, și nu o bicicletă, motocicletă, scuter, moped, mokick etc., unde stabilitatea se obține prin „manevrarea” călărețului sau motociclistului. Apropo, trebuie să citiți multe despre cum se realizează stabilitatea unei biciclete și a altor vehicule cu două roți datorită efectului giroscopic al roților lor. Aceasta este o exagerare clară și iată de ce.
Care este efectul giroscopic? Aceasta este apariția unui moment în care se încearcă deplasarea cu forță a axei unui corp în rotație. Într-un cuvânt, ceea ce am considerat în secțiunea anterioară. Dar nu am determinat amploarea momentului giroscopic. Pentru exemplul dat de rotire a unei roți de bicicletă, de exemplu, acest moment este egal cu produsul dintre momentul de inerție al roții și viteza unghiulară de rotație a acesteia și viteza unghiulară de rotație („precesiune forțată”). Pentru simplitate, decidem că masa roții este de 2 kg, raza acesteia este de 0,25 m și, prin urmare, momentul de inerție, egal cu produsul masei cu pătratul razei, este egal cu 0,125 kg? m 2. Un biciclist manevrează calm deja cu o viteză de 1 m/s, iar roata se rotește cu o viteză unghiulară de 4 rad/s. Viteza unghiulară de rotație a axei roții este de 20 de ori mai mică și este de aproximativ 0,2 rad/s. Ca rezultat, obținem un moment giroscopic egal cu 0,1 Nm. Acesta este același lucru dacă atârnați o greutate de 10 g pe o riglă lungă de 1 m. Este puțin probabil ca un astfel de moment să ajute la ceva.
În același timp, un biciclist care se întoarce la doar 10 cm de linia dreaptă, cu excepția cazului în care se înclină în mod deliberat spre viraj, va crea un moment egal cu greutatea lui plus jumătate din greutatea bicicletei (aproximativ), înmulțit cu 0,1 m, sau, aproximativ, 100 Nm. Acesta este de 1.000 de ori mai mare decât momentul giroscopic! Acesta este modul în care se obține stabilitatea bicicletei.
Dar nu avem nevoie de o bicicletă, ci de o mașină care, chiar și în poziție staționară, ar menține echilibrul. În primul rând, singura garanție împotriva răsturnării într-o parcare este oferită de standuri speciale sau, în cel mai rău caz, cărămizi plasate sub laterale. Nu există stabilitate fără astfel de suporturi sau fără reglarea constantă manuală sau automată a acestei stabilități. Dar să fim de acord că nu putem obține această stabilitate cu o rotire a roților mașinii, deoarece nu vom putea crea cu corpul nostru un moment suficient pentru a contracara răsturnarea, ca pe o bicicletă. Imaginați-vă că toți pasagerii mașinii, în frunte cu șoferul, se vor agita constant pe scaune, salvând mașina de la răsturnare. Aici ai nevoie de un stabilizator care nu depinde de rotația roților și de poziția pasagerilor.
Aici ar putea fi util efectul giroscopic discutat mai sus. Și un astfel de vehicul cu două roți a fost creat în 1914 de inginerul rus P.P. Shilovsky și înainte de aceasta de englezul Brennan. Adevărat, echipa lui Brennan s-a deplasat de-a lungul unei șine și, strict vorbind, a fost un echipaj de monorai, dar acest lucru nu schimbă esența problemei. Este mai simplu decât echipajul Shilovsky, cu control manual, iar principiul său de funcționare este mai ușor de înțeles (Fig. 64).

Când mașina s-a înclinat, să zicem, spre dreapta pe parcurs, șoferul a rotit mânerul 3 spre stânga. Astfel, prin forțarea volantului din cadrul 1 la precesare, a provocat un moment giroscopic care acționează asupra cadrului 2 fixat rigid pe platformă și îndreptat spre stânga în mișcare. Trăsura se îndrepta singură. Nu contează dacă căruciorul era în mișcare sau staționează. Această trăsură, care putea găzdui 40 de persoane, a fost construită pentru Expoziția Anglo-Japoneză din 1912 și a transportat vizitatorii în jurul spațiului expozițional. Trebuie spus că șoferul trebuia să fie un om sănătos și greu, altfel nu ar fi putut face față rolului de regulator automat. Iar volantul trebuia să cântărească sute de kilograme și să se învârtească destul de repede.
Dar trăsura lui Shilovsky, care a apărut pe străzile Londrei în 1914, a eliberat oamenii de astfel de inconveniente; diagrama acestuia este prezentată în fig. 65. Mai exista un cadru mobil 1 cu volant de 314 kg, montat pe o osie într-un cadru fix legat rigid de caroseria autoturismului. Cu toate acestea, rolul unei persoane a fost jucat de un automat primitiv, constând dintr-un tub cu o bilă 4, care, atunci când mașina era înclinată, s-a rostogolit într-o parte și a închis contactul corespunzător 3. Acest lucru a pus motorul electric 2 să funcționeze. și, printr-o transmisie cu roți dințate, a rotit cadrul 1 cu un volant, la fel ca regulatorul-omul puternic al lui Brennan.

Ce poți spune despre mașina lui Shilovsky? Pentru vremea lui a fost un miracol, adunând sute de privitori pe străzile Londrei (Fig. 66). Dar a fost conceput ca un vehicul militar pentru călătorii pe teren accidentat și era foarte scump pentru o mașină obișnuită. În plus, automatizarea a lăsat de dorit, iar mașina s-a comportat necorespunzător la viraj. Dar și-a jucat rolul și a intrat în istoria transportului cu motor.
 Orez. 66. Mașina cu două roți a lui Shilovsky (vedere generală)
Orez. 66. Mașina cu două roți a lui Shilovsky (vedere generală)Și în 1967, a apărut o nouă mașină americană cu două roți, Jiron, care a fost testată cu același principiu de stabilizare a caroseriei. Dar totul era de dimensiuni mici și modern: un volant cu un diametru de numai 0,6 m, care se rotește cu o frecvență de 6 mii de rotații pe minut, se potrivea sub capota mașinii. Motorul mașinii, cu o putere de numai aproximativ 60 kW, ținea volantul în rotație și era suficient pentru a propulsa mașina cu o viteză de 140 km/h. Când este parcat și la viteze reduse, roțile de sprijin suplimentare sunt extinse. Această mașină a mers cu ușurință pe trasee și pe pante cu o pantă transversală de până la 60 °, menținând verticalitatea, ceea ce o mașină obișnuită, desigur, nu poate face. Se pare că aceasta a fost ideea inițială a lui Shilovsky, dar el nu a reușit să o implementeze în 1914.
Vehiculul cu două roți are viitor? Este dificil să răspunzi la această întrebare cu vreo certitudine. Autorul nu are o părere clară asupra acestei probleme. Poate că, odată cu dezvoltarea automatizării, computerizarea mașinilor și nevoia unei mașini foarte manevrabile și economice, aceasta va apărea din nou. Dar un lucru de care poți fi sigur este că volantele vor apărea pe mașini în primul rând nu ca stabilizatori, ci ca dispozitive de stocare a energiei care pot crește foarte mult eficiența și dinamismul mașinilor. Atunci de ce să nu folosiți volantul deja pe mașină ca stabilizator?
Cum se acumulează energia cinetică?
Când învârtim un volant, acumulăm energie cinetică în el. Energia este un atribut indispensabil al oricărui corp în rotație și este egală cu jumătate din produsul momentului de inerție al volantului (l-am calculat deja pentru o roată de bicicletă) cu pătratul vitezei unghiulare.
În ce măsură putem acumula energie în el? Vom accelera volantul din ce în ce mai repede, iar energia din el va crește și mai repede - am mărit viteza unghiulară de 2 ori, iar energia a crescut de 4. Există o limită pentru aceasta? Ei bine, în primul rând, un astfel de volant va începe să „conducă” aerul, ca un ventilator bun. Autorul a învârtit o roată de transport (de la un vagon de pasageri) cu până la 6 mii de rotații pe minut pe o instalație specială, iar aceasta a necesitat zeci de kilowați de putere. Puterea maximă a motorului mașinii este doar pentru a menține rotația unui astfel de volant!
Dacă pompați aerul, atunci pierderea de putere va scădea imediat de sute de ori - suporturile sau rulmenții volantului „iau” foarte puțin pentru rotirea lor. Dar putem merge mai departe și putem instala rulmenți magnetici în locul celor convenționali (vom vorbi mai târziu despre ei) și să eliminăm aproape complet pierderile datorate rotației volantului. Un astfel de volant, odată accelerat, se va roti luni, sau chiar ani, până se oprește. Cu cât volantul este mai mare, cu atât se va învârti mai mult. Volanul mare - Pământul - se rotește de aproximativ 4 miliarde de ani, iar în acest timp a încetinit doar de 3 ori, deși pierderile, după standardele noastre, sunt colosale. Luna „încetinește” rotația Pământului prin fluxul și refluxul tuturor oceanelor, iar aceasta este o putere de multe ori mai mare decât puterea generată artificial de umanitate.
Așadar, ne accelerăm volantul (deși este încă aceeași roată de transport pe o instalație specială care permite de fapt pomparea aerului din camera de rotație a volantului) din ce în ce mai mult. La 8 mii de rotații pe minut observăm (cu instrumente speciale) că discul începe să se întindă, luând puțin O dimensiuni mai mari. O altă creștere mică a rotației - și volantul se rupe, de obicei în trei părți, trei fragmente mari care pătrund adânc în stratul protector de plumb (Fig. 67). Desigur, viteza de dispersie a fragmentelor a depășit 400 m/s, aproape ca un glonț de pușcă.
 Orez. 67. Imaginea rupturii volantului
Orez. 67. Imaginea rupturii volantuluiDe ce s-a întâmplat asta, ce a împiedicat volantul să accelereze mai mult? Da, tot aceeași inerție. Fiecare particulă a volantului se străduiește să se miște în linie dreaptă, dar aici este „forțată” să se abată de la calea dreaptă și atât de des. Rezistența metalului volantului, deși poate, împiedică împrăștierea acestor particule, dar atunci când solicitările mecanice devin extrem de mari, metalul nu poate rezista și se rupe. Particulele (de obicei trei fragmente mari!), după ce au câștigat libertate, se împrăștie de-a lungul liniilor drepte - tangente la cercul de rotație.
Există o formulă simplă pentru determinarea tensiunilor din materialul volantului dacă acesta este realizat sub forma unui inel de jantă, așa cum este cel mai adesea cazul. Voltaj - ? egală cu densitatea materialului – ?, înmulțită cu pătratul vitezei periferice – V a volantului. Pentru roata căruciorului pe care tocmai am rupt-o, din oțel de înaltă calitate, aceste solicitări s-au dovedit a fi:
7 800 400 2 = 1,25 x 10 9 Pa,
unde 7.800 este densitatea oțelului, kg/m3;
400 – viteza cu care s-a rupt volanta, m/s.
O tensiune de 1,25 x 10 9 Pa sau, după cum se spune mai des, 1.250 MPa este tensiunea maximă de întindere a oțelului de înaltă calitate și tratat termic din care sunt fabricate roțile de tren.
În același timp, roata noastră a acumulat atâta energie cât era conținută în fragmente zburând cu o viteză de 400 m/s - fiecare kilogram de fragment - 4002 m 2 / s 2 /2 = 80.000 J. Cu alte cuvinte, specificul intensitatea energetică a volantului nostru în momentul ruperii a fost de 80 kJ/kg. Este mult sau puțin? Este aproape la fel ca bateriile de mașină și de zeci de ori mai mult decât cei mai buni condensatori. Dar trebuie să ne amintim că această energie se acumulează în momentul ruperii, ceea ce nu poate fi permis! Prin urmare, această cifră trebuie redusă de cel puțin 2-3 ori. Insuficient.
Ce se întâmplă dacă luăm un material mai puternic decât oțelul? Și mai ușor, mai puțin dens, pentru a reduce stresul? Da, atunci putem conta pe valori energetice mari, dar există astfel de materiale?
Adevărul este că există și există destul de multe în tehnologia modernă: sârmă de oțel, bandă din metal amorf (metglass), fibre din carbon, Kevlar (din care este făcută armura corporală) , cuarț și chiar și încă foarte puțină fibră „diamantă” . Consumul specific de energie al volantelor realizate din astfel de materiale va fi, respectiv, egal cu: 200, 500, 1.500, 1.800, 5.000 si 15.000 kJ/kg. Aceste din urmă cifre sunt foarte mari - judecă singur, sunt de aproape 100 de ori mai mari decât cele ale bateriei unei mașini! Chiar și acum 20 de ani, astfel de cifre au fost publicate atât de japonezi, cât și de americani.
 Orez. 68. Supravolanta de sârmă cu capetele firelor în interiorul bobinei:
Orez. 68. Supravolanta de sârmă cu capetele firelor în interiorul bobinei:1 – înfășurare spre centru (săgețile indică direcția de înfășurare); 2 – înfășurare normală; 3 – arbore; 4 – obraz
Este posibil să se facă volante din astfel de fibre sau benzi? La urma urmei, de obicei sunt turnate sau falsificate. Se dovedește că este posibil și, în unele cazuri, este chiar mai ușor decât turnarea sau forjarea. Aceste fibre și panglici trebuie înfășurate pe centrul sau butucul volantului, în același mod în care înfășurăm firele pe o bobină. Doar acest centru trebuie să aibă elasticitatea necesară, înfășurarea trebuie să se producă cu o anumită tensiune, iar ultima tură nu trebuie să fie în exterior, ci în interiorul înfășurării (Fig. 68). Și dacă toate acestea se vor face, vom obține un volant minunat, super-intensiv de energie, numit super volant, care va exploda în siguranță, fără fragmente. Într-un super volant bobinat din bandă (Fig. 69, a), dacă viteza critică de rotație este depășită accidental (sau intenționat!), bobina exterioară cu cea mai mare încărcare se rupe; se îndepărtează de înfășurarea principală și, apăsând pe corpul volantului, frânează rotația prin frecare (Fig. 69, b). Pe lângă intensitatea ridicată a energiei, obținem și siguranță, ceea ce este atât de important pentru volante!
 Orez. 69. O înfășurare a volantului dintr-o bandă puternică (a) și o imagine a rupturii sale în carcasă (b): 1 – bandă; 2 – carcasă; 3 – centru
Orez. 69. O înfășurare a volantului dintr-o bandă puternică (a) și o imagine a rupturii sale în carcasă (b): 1 – bandă; 2 – carcasă; 3 – centruInvenția super-volantului a fost asociată cu o serie de ciudatenii corespunzătoare epocii trecute. În mai 1964, studentul absolvent de 24 de ani, autorul acestor rânduri, solicită inventarea unui super volant. Dar, deoarece în acele vremuri sovietice o invenție era considerată un „cadou voluntar” pentru stat, aplicațiile au fost verificate cu atenție pentru utilitate. Pentru ca nimeni să nu dea statului orice. Acum nu verifică utilitatea unei invenții: plătiți taxa - obțineți un brevet! Dacă nu este de folos, falimentați singur!
Deci, o organizație „competentă” a stabilit că volantele trebuie forjate sau turnate, dar bobinarea lor din sârmă sau fibre este o prostie! Deci, autorului i s-a refuzat un certificat de autor (ceea ce a înlocuit apoi un brevet). Dar prioritatea rămâne. Conform acelorași legi sovietice, dacă utilitatea este dovedită, atunci invențiile pot fi recunoscute din nou. Aplicațiile în sine au fost ținute sub pământ într-un depozit secret undeva în Urali. Și apoi a venit momentul, iar în ianuarie 1965 americanii au depus o cerere pentru superflywheels, iar în spatele lor a venit un flux de tarile dezvoltate. Se construiesc superflywheels, se folosesc în tehnologie (în special în aviație și în tehnologia spațială - încă sunt scumpe!), iar asupra lor se convoacă simpozioane internaționale. Autorul a făcut contestație și – wow – i s-a eliberat un certificat de autor cu prioritate în 1964, dar... 20 de ani mai târziu, adică după perioada în care toate drepturile asupra invențiilor devin universale. Acestea sunt legile brevetelor! Dar și autorul este mulțumit de asta - măcar vom ști cine a inventat primul super volant și în ce țară!
Acesta este modul și în ce mod este cel mai bun mod de a acumula energie mecanică și energie în general. Faptul este că progresul în crearea materialelor ultra-puternice nu stă pe loc, iar crearea așa-numitelor materiale „ambalate dens” și „stele” cu o rezistență și densitate fantastice a fost deja prezisă. Un volant fabricat din astfel de materiale poate servi, de exemplu, ca motor, adică poate furniza energie unei mașini pe întreaga durată de viață, în timp ce este rotit pe linia de asamblare!
Arc, cauciuc sau gaz?
Scuzați-mă, volante, super volante... nu înmagazinează energie mecanică în arcuri, așa cum se face, de exemplu, la ceasurile sau jucăriile mecanice? La urma urmei, există dispozitive de stocare „elastice” sau acumulatori de energie.
Bateriile care folosesc elasticitatea sau energia potențială au fost folosite de om din cele mai vechi timpuri: să ne gândim la arcuri, arbalete și catapulte. În timpul Renașterii, motoarele cu arc puteau fi găsite în jucăriile cu vânt, ceasuri și chiar în cărucioarele „autoportante” (Fig. 70), destinate exclusiv plecării ceremoniale a regilor. Izvoarele erau apoi forjate de fierari și erau foarte scumpe.
 Orez. 70. Trăsura mecanică din secolul al XVI-lea. cu un motor cu arc acționat de o roată de rulare (din desenul lui Albrecht Durer)
Orez. 70. Trăsura mecanică din secolul al XVI-lea. cu un motor cu arc acționat de o roată de rulare (din desenul lui Albrecht Durer) În zilele noastre, motoarele cu arc pentru o mare varietate de mecanisme sunt produse în serii de milioane de dolari. Cele mai comune dintre acestea sunt motoarele cu arc elicoidal. Banda de arc întărită este plasată într-un suport (tambur), atașat cu un capăt de acesta, celălalt de arbore și înfășurat în jurul lui (Fig. 71). În această stare „înarmată”, arcul este „forțat”, adică este lăsat câteva ore sau zile pentru a-și stabiliza proprietățile elastice. Eficiența acestor motoare este peste 0,9. Banda cu arc se îndoaie. Mai mult, acea parte a acesteia care este mai tensionată (răsucită la un diametru mai mic) acumulează mai multă energie; părțile periferice sunt mai puțin tensionate și deci acumulează mai puțină energie. Dacă arcul este mai întâi îndoit într-o formă de S, atunci toate secțiunile sale vor fi solicitate uniform și va acumula mult mai multă energie potențială.
 Orez. 71. Acumulator cu arc cu arc spiralat (a) și arc spiralat în formă de S (b): 1 – cușcă; 2 – primăvară; 3 – arbore
Orez. 71. Acumulator cu arc cu arc spiralat (a) și arc spiralat în formă de S (b): 1 – cușcă; 2 – primăvară; 3 – arbore De asemenea, puteți crește capacitatea energetică a arcurilor spiralate, oferindu-le un profil canelat. Înfășurat pe arbore, un astfel de arc suferă o deformare la îndoire atât în direcția longitudinală, cât și în direcția transversală și acumulează energie maximă. Arcurile în formă de S cu profil canelat au alte avantaje, cum ar fi cuplul aproape constant.
 Orez. 72. Acumulator hidraulic cu motor cu arc: 1 – arc; 2 – piston; 3 – motor hidraulic
Orez. 72. Acumulator hidraulic cu motor cu arc: 1 – arc; 2 – piston; 3 – motor hidraulicPentru mașinile cu sistem hidraulic, un acumulator hidraulic cu motor cu arc este cel mai potrivit (Fig. 72). În ea, energia este acumulată și eliberată în timpul injectării sau eliberării uleiului. Aici arcul nu mai este un arc de bandă, ci unul de sârmă. Eficiența firului poate fi crescută semnificativ prin îndepărtarea secțiunilor axiale, care, atunci când sunt răsucite, nu participă la procesul de stocare a energiei. Desigur, fabricarea tuburilor cu proprietăți de rezistență ridicată în locul sârmei cu arc este mult mai complicată și dificilă, dar dacă este necesar, trebuie să faceți acest lucru. Cu toate acestea, în ciuda tuturor măsurilor de creștere a intensității energetice a motoarelor cu arc, acestea rămân cu mult în urma altor tipuri de baterii în acest indicator. De exemplu, intensitatea energetică a volantelor depășește de zeci de mii de ori intensitatea energetică a oricăror arcuri cu aceeași rezistență a materialului! Care sunt modalitățile de creștere a intensității energetice a bateriilor „elastice”? Cu cât forța și mișcarea sub influența acestei forțe sunt mai mari, cu atât energia mecanică acumulată în baterie este mai mare. Prin urmare, este recomandabil să folosiți ca element de acumulare materiale care permit deformații mari sub influența unor forțe mari. Și aici, poate, nu veți găsi nimic mai bun decât benzina. Când este comprimat, este stocată o energie enormă, comparabilă cu energia promițătoare a bateriilor electrice și a volantelor. Din păcate, dezavantajele bateriilor „gaz” (Fig. 73) sunt foarte semnificative.
 Orez. 73. Acumulator de gaz (acumulator pneumatic): 1 – butelie; 2 – motor pneumatic; 3 – supapă
Orez. 73. Acumulator de gaz (acumulator pneumatic): 1 – butelie; 2 – motor pneumatic; 3 – supapăÎn primul rând, gazul trebuie pompat în cilindru cu ajutorul unui compresor, iar energia trebuie extrasă cu ajutorul unui motor pneumatic. Dar eficiența acestor unități este destul de scăzută: este bine dacă reușești să folosești cel puțin un sfert din energia cheltuită. Și încă ceva: când gazul este comprimat, se încălzește, iar când se extinde, se răcește. Prin urmare, gazul nou pompat în cilindru este foarte fierbinte, dar în timp se răcește, preia temperatura mediului ambiant, iar această căldură eliberată ia cu ea până la 40% din energia acumulată - din rezervele de mișcări rămân doar firimituri jalnice. acumulatorul de gaz.
Cu toate acestea, există o modalitate de a crește eficiența bateriilor cu gaz - aceasta este simbioza lor cu o acționare hidraulică (Fig. 74). Mai sus a fost menționat un acumulator hidraulic cu arc, unde energia este acumulată de un arc, iar sistemul hidraulic acționează doar ca transmisie. În același timp, eficiența bateriei (numită hidro-gaz) crește foarte mult. În primul rând, gazul se extinde într-o măsură mult mai mică decât în bateriile cu gaz pur și se generează mult mai puțină căldură. În al doilea rând, sistemul hidraulic, care în acest caz este hidrostatic, sau static, are o eficiență foarte mare. Prin urmare, bateriile cu hidrogaz sunt utilizate pe scară largă pentru a acumula cantități semnificative de energie într-o mare varietate de mașini: prese, dispozitive de pornire și avioane.
 Orez. 74. Acumulator hidrogaz (hidropneumatic): 1 – cavitate de gaz; 2 – lichid; 3 – compartimentare elastică; 4 – mașină hidraulică reversibilă; 5 – rezervor
Orez. 74. Acumulator hidrogaz (hidropneumatic): 1 – cavitate de gaz; 2 – lichid; 3 – compartimentare elastică; 4 – mașină hidraulică reversibilă; 5 – rezervor Pentru a crește energia specifică a acumulatorilor de hidrogaz, cilindrul în care este pompat gazul este realizat din cele mai durabile materiale care au și o densitate scăzută. Astfel de materiale pot fi fibră de sticlă sau grafit cu o legătură epoxidică, precum și o serie de materiale ultra-rezistente dezvoltate recent. Cilindrul este cel mai bine realizat sub forma unei sfere (are cea mai mică zonă cu cel mai mare volum), a cărei suprafață interioară este etanșată corespunzător. Gazele inerte din punct de vedere tehnic sunt folosite pentru pomparea în cilindru - de obicei azot, mai rar heliu. Mediile de gaz și lichid dintr-o astfel de baterie sunt cel mai adesea separate. În modelele mai vechi de cilindri cilindrici, acest lucru se făcea folosind un piston liber, iar în cele mai progresive, inclusiv cele sferice, folosind o partiție elastică. Presiunea gazului în astfel de baterii este de obicei de 15-40 MPa.
Bateriile gigantice pe gaz pot fi folosite ca dispozitive de stocare pentru centralele electrice. Energia va fi stocată în baterie prin comprimarea gazului (cel mai probabil aer) pe timp de noapte, când consumul de energie electrică este scăzut. În orele de vârf, când este necesară puterea maximă a centralei, gazul va fi alimentat către turbine puternice sau alte motoare cu aer, adăugând energie stocată energiei centralei. Conform proiectelor existente, gazul ar trebui să fie injectat în cavități uriașe subterane (de exemplu, minele extrase).
Dar să revenim la solide. Nu există într-adevăr substanțe care, deși au o rezistență suficientă (de exemplu, precum metalele), să aibă și deformare elastică mare? Atunci un arc din astfel de materiale ar acumula mai multă energie.
Se dovedește că există astfel de materiale și se numesc pseudoelastice. Pseudoelasticitatea este capacitatea unui material (metal) de a se întinde până când se rupe, nu cu 1–2%, cum ar fi sârma de oțel, de exemplu, ci cu 15–20%. În plus, dacă oțelul obișnuit „obosește” atunci când este deformat și nu rezistă atât de multe cicluri (amintiți-vă cât de des se rup arcurile!), atunci materialul pseudoelastic, care are un principiu de deformare diferit, rezistă la ciclurile de încărcare practic fără „oboseală”.
Materialele pseudoelastice sunt aproape aceleași cu cele care au efect de memorie a formei; s-au scris și se scriu multe despre ele. Acestea sunt în principal aliaje de titan și nichel; dacă li se oferă o anumită formă într-o stare încălzită și apoi, după răcire, schimbați această formă (de exemplu, îndoiți firul după cum doriți), atunci când este încălzit, aliajul își va lua din nou forma anterioară, ca și cum ar fi „amintindu-și”. aceasta. Astfel de aliaje sunt acum folosite în multe cazuri, începând cu motoarele termice care funcționează fără abur și benzină la o diferență minimă de temperatură și terminând cu sonde care sunt introduse în artere și chiar în inima umană. Când este încălzit în corpul său, aliajul își „amintește” forma anterioară și, de exemplu, extinde artera.
Dar vorbim despre proprietatea de pseudo-elasticitate a unor astfel de materiale. Sârma realizată dintr-un astfel de aliaj poate fi deformată - îndoită, întinsă de 10 ori mai mult decât cel mai puternic și mai elastic oțel. Prin urmare, un arc realizat dintr-un astfel de material va acumula de 10 ori mai multă energie. Ce salt în acumularea de energie! Un ceas cu un astfel de arc, de exemplu, va funcționa de 10 ori mai mult decât unul convențional cu bobinaj, dar deocamdată un astfel de ceas poate fi folosit doar într-o saună. Deoarece un astfel de material capătă rezistență „elastică” la 150-200 °C. Autorul nu are nicio îndoială că în curând vor fi create materiale care vor fi „puternice” chiar și la temperatura camerei. Între timp se comportă leneș la asemenea temperaturi, lungindu-se și scurtându-se încet, de parcă ar fi făcute din rășină, doar foarte rezistente.
Dar autorul a venit cu o utilizare pentru astfel de materiale astăzi, iar utilizarea este foarte eficientă - pentru sport. Dacă faceți un cablu pentru aruncarea unui ciocan nu din oțel, ci dintr-un material similar ca rezistență cu acesta, atunci când ciocanul se rotește, cablul pseudo-elastic se va întinde de 20 de ori mai mult decât cablul de oțel. Și acest lucru, așa cum sunt bine conștienți de aruncatorii de ciocane, va oferi o creștere semnificativă, de aproape 20%, a razei de zbor a proiectilului. Materialul cablului nu este reglementat în regulament, așa că nu vor exista încălcări!
Un stâlp din fibră de sticlă în loc de bambus a ajutat la ridicarea recordurilor de sărituri, iar un cablu din material pseudoelastic va ridica recordurile aruncătorilor. Sportivi, nu ezitați, recordurile vă așteaptă!
Mai rămâne un material care are o deformare elastică enormă, deși nu este atât de puternic. Aceasta este o anvelopă familiară tuturor. Funcționează cel mai bine în tensiune, acumulând energie specifică de zeci de ori mai mult decât arcurile din oțel. Cu toate acestea, pentru mașini este necesar ca, la fel ca la arcurile principale, arborele acumulatorului să fie răsucit.
Ținând cont de acest lucru, autorul a proiectat un cuplaj de acumulator elastic (Fig. 75). Toroanele de cauciuc, fixate la capetele lor de jumătățile de cuplare antrenată și antrenată, se sprijină pe discuri de susținere intermediare ușoare (de exemplu, din plastic) care stau liber pe axă și, atunci când jumătățile de cuplare sunt rotite una față de alta, iau pozitia unui helix. Deoarece fixarea hamurilor de jumătățile de cuplare este articulată, cauciucul este practic doar supus tensiunii. Din punct de vedere al intensității energetice, acest ambreiaj este comparabil chiar și cu volantele.
Dar de ce elementele din cauciuc, având calități atât de valoroase, nu sunt atât de utilizate ca dispozitive de stocare a energiei?
 Orez. 75. Cuplaj cauciuc – acumulator de energie: 1 – arbore de antrenare; 2 – jumătate de cuplare antrenată; 3 – benzi de cauciuc; 4 – suport pentru discuri intermediare
Orez. 75. Cuplaj cauciuc – acumulator de energie: 1 – arbore de antrenare; 2 – jumătate de cuplare antrenată; 3 – benzi de cauciuc; 4 – suport pentru discuri intermediare Dacă deformați, de exemplu, întindeți un element elastic din cauciuc și înregistrați dependența forței de mișcarea capătului său, atunci curba de întindere a cauciucului atunci când se acumulează energie în el va diferi de curba de contracție a acestuia când energia este lansat. Aceste două curbe formează o așa-numită buclă de histerezis, care caracterizează pierderile de energie datorate histerezisului elastic (Fig. 76). Și cu cât întindeți mai mult cauciucul, adică acumulați energie în el, cu atât pierderile datorate histerezisului elastic sunt mai mari. În plus, cu cât energia este stocată mai mult timp în cauciucul întins, cu atât bucla de histerezis este mai mare și va fi returnată mai puțină energie; Pierderile de histerezis distrug treptat cauciucul, iar proprietățile acestuia se modifică. Toate acestea (nu vorbim despre alte dezavantaje) limitează utilizarea elementelor elastice din cauciuc pentru stocarea energiei în instrumente și mașini precise, durabile și fiabile. Acumulatoarele de energie din cauciuc sunt utilizate pe scară largă în modele ca motoare din cauciuc.
 Orez. 76. Graficul de întindere a unei benzi de cauciuc
Orez. 76. Graficul de întindere a unei benzi de cauciucIar faptul că cauciucul este mult mai potrivit pentru stocarea energiei decât un arc este dovedit de faptul că multe modele de avioane și elicoptere zboară cu motoare din cauciuc, dar nici un singur model nu a decolat vreodată cu un arc!
Cum să ajuți Formula 1?
Și, de fapt, nu numai Formula 1, ci orice mașină – să devină mai dinamică. Ar arăta mai impresionant la Formula 1.
Dacă volantul este un depozit de energie atât de încăpător, atunci de ce să nu conduceți vehiculele din el, ca de la un motor? Rotiți volantul cu un motor electric - și să mergem!
Da, există astfel de mașini de transport, de exemplu, cărucioare pentru transportul în interiorul fabricii (Fig. 77). Ei merg înainte și înapoi și se pot opri. Pur și simplu nu pot schimba viteza singuri, se schimbă singură - totul scade pe măsură ce scade rezerva de energie din volantă.
 Orez. 77. Cărucior de marfă cu volantă:
Orez. 77. Cărucior de marfă cu volantă:1 – cutie de viteze; 2 – mâner de mers și marșarier; 3 – mâner ambreiaj; 4 – volanta; 5 – motor electric; 6 – platformă; 7 – șasiu

 Orez. 78. Autobuz elvețian cu volant - girobus (a) și volantul său (b)
Orez. 78. Autobuz elvețian cu volant - girobus (a) și volantul său (b)Acest comportament este inacceptabil pentru o mașină. Trebuie să-și schimbe viteza după cum dorește șoferul. Pentru a face acest lucru, trebuie să existe o transmisie continuu variabilă între volant și roțile mașinii. O cutie de viteze în trepte nu este potrivită aici; fiecare schimbare de viteză aici va fi însoțită de un șoc și de alunecarea prelungită a ambreiajului - nu va fi suficientă energie la volantă. Prin urmare, în primul autobuz cu volant - girobusul, construit în anii 1950. în Elveţia (Fig. 78, a), s-a folosit o transmisie electrică variabilă continuu. Girobusul a fost folosit în Elveția, Belgia, chiar și în Africa, a parcurs 1,5 km între reîncărcarea volantului (Fig. 78, b) pe trasee de până la 10 km lungime. Dar, în ciuda apariției unor girobusuri similare până în prezent în Europa și America, este dificil să le numim promițătoare. Ca, într-adevăr, orice mașină care funcționează cu energie stocată, inclusiv mult lăudatele mașini electrice. Autorul se angajează să demonstreze acest lucru pe scurt.
În primul rând, dacă toate mașinile sunt transformate în vehicule electrice, sau mahomobile, ca un girobus, atunci nu va exista suficientă energie de la centralele electrice din întreaga lume pentru a-și reîncărca dispozitivele de stocare. În același timp, nu mai este suficient peste tot, dar aici vor fi conectate mașini, a căror putere totală este de multe ori mai mare decât puterea tuturor centralelor electrice din lume. În al doilea rând, dacă calculați eficiența unei centrale electrice convenționale cu conversie de curent și transferați-o la distanța necesară și luând în considerare pierderile din încărcător și baterie, puteți vărsa lacrimi. Această eficiență va fi semnificativ mai mică decât cea de 40% pe care o poate oferi motorina în cel mai bun caz. Și cu atât mai mult 60-70% care este furnizat de așa-numitele celule de combustie sau generatoare electrochimice, care transformă în mod direct, silențios și ecologic energia combustibilului în electricitate.
Deci, nu este deloc nevoie de depozitare pe mașină? Nu, este necesar, doar pentru un scop ușor diferit. Cert este că motorul nu funcționează aproape niciodată la eficiență maximă într-o mașină. Pentru a face acest lucru, trebuie să funcționeze la putere aproape maximă, adică, pentru a fi mai clar pentru șoferi, pedala de accelerație trebuie apăsată pe podea (Fig. 79). Acest lucru se întâmplă fie la viteza maximă (de obicei cel puțin 150-160 km/h pt mașini moderne) sau în timpul manevrelor – depășiri. În oraș, de exemplu, puterea medie a motorului este mai mică de o zecime din cea instalată. Eficiența este de 5–7%, ceea ce se vede din consumul de combustibil. Și conducerea, de exemplu, cu o viteză de 160 km/h este atât neeconomic - tot combustibilul este cheltuit pentru agitarea aerului, cât și periculos - pe majoritatea autostrăzilor, poliția rutieră nu va permite acest lucru.
 Orez. 79. Dependența eficienței motorului de sarcina sa de putere
Orez. 79. Dependența eficienței motorului de sarcina sa de putereCe poți face pentru ca motorul să funcționeze întotdeauna în modul optim, cel mai economic? Cu un volant este foarte simplu. Motorul de putere redusă funcționează în mod constant în modul optim, dând toată energia generată cu eficiență maximă volantului. Volanul în acest caz acționează ca o „bancă” pentru energie (Fig. 80). Dacă acest „banc” depășește, motorul se oprește automat. Mașina își primește mișcarea exact de la volant printr-o transmisie continuu variabilă. Pe lângă faptul că mașina folosește cea mai „economică” energie pentru a se deplasa, la coborâri și la frânare, excesul de energie nu se pierde în frâne, ci se întoarce la volan. Acest proces se numește recuperare și poate îmbunătăți și mai mult eficiența vehiculului, drept urmare randamentul motorului poate fi chiar mai mare decât maximul său.
 Orez. 80. Schema unității de putere hibride a unui automobil: 1 – motor; 2 – transmisie variabilă continuu; 3 – volanta
Orez. 80. Schema unității de putere hibride a unui automobil: 1 – motor; 2 – transmisie variabilă continuu; 3 – volanta Situația este ușor diferită cu un vehicul electric care folosește pile de combustie. Dacă vă amintiți, doar astfel de vehicule electrice nu consumă energie puțină și scumpă din rețea, ci ele înșiși o extrag din combustibil cu o eficiență care depășește eficiența centralelor termice. Dar pilele de combustibil au un dezavantaj major - nu oferă multă putere. 60 W la 1 kg de masă pentru ei este limita atunci când eficiența lor este încă acceptabilă. Pentru 60 kW - puterea medie a unui autoturism - este nevoie de 1 tonă; aceasta este aceeași cu greutatea mașinii în sine. Dar ai nevoie si de un motor electric, care la putere mare este foarte greu.
 Orez. 81. Diagrama noului concept de unitate de putere a vehiculului electric:
Orez. 81. Diagrama noului concept de unitate de putere a vehiculului electric:1 – pile de combustibil; 2 – motor electric accelerator; 3 – super volant; 4 – transmisie variabilă continuu
Cum poate un volant să ajute o mașină electrică? Da, aproape la fel ca în cazul precedent. O celulă de combustie mică, cu o greutate de 15 kg, este accelerată constant printr-un motor electric mic, dar de mare viteză (putere de 10 kW, cântărind 10 kg), un volant mic (super volant cu o greutate de 10 kg), iar de acolo energia este transmisă prin o transmisie continuu variabilă la roți (Fig. 81). Frânarea și coborârea adaugă energie volantului, la fel ca înainte. Unitatea de putere se dovedește a fi atât de mică încât se potrivește într-o caroserie standard, în loc de cea obișnuită cu motor. Dezvoltatorul noului concept de mașină electrică este autorul acestor rânduri.
Poate ați observat că în toate aceste cazuri, grupul motopropulsor al volantului, numit hibrid sau combinat, necesită o transmisie continuu variabilă. Aceasta este principala dificultate și complexitate a unei astfel de unități. Există diferite tipuri de transmisii variabile continuu - electrice, hidraulice sau mecanice. De preferat, desigur, sunt cele mecanice, deoarece nu convertesc forma energiei, sunt compacte și economice.
Dar se pune întrebarea: este cu adevărat necesară această transmisie continuu variabilă, atât de complexă și costisitoare? La urma urmei, dacă în locul unui volant ar exista un arc de înfășurare, așa cum este cazul mașinilor de jucărie mecanice, nu ar fi nevoie de transmisie variabilă continuu. Arcul principal are o așa-numită caracteristică „moale”, care nu necesită o transmisie continuu variabilă. Arcul de înfășurare poate muta o mașină staționară de la locul său, „o conduce” cu viteză mare și, dacă este necesar, la coborâre sau la frânarea mașinii, „își ia energia asupra sa”. Arcul poate face totul, dar există o problemă: intensitatea energetică a arcurilor este extrem de scăzută - de mii de ori mai mică decât cea a super volantelor. Nu este potrivit pentru alergări lungi: o sută sau doi metri este limita pentru o jucărie. Dar…
Chiar înainte de Războiul Patriotic din 1941-1945. S-a observat că un foc de artilerie care conține un arc principal în miniatură trage mai devreme decât ar trebui. Oamenii de știință și-au dat seama că acest lucru se întâmplă din cauza rotației proiectilului, care este destul de rapidă și are loc din cauza striurilor din țevi. Dacă arcul este rotit, bobinele sale tind spre periferie (toate datorită proprietății de inerție) cu o forță enormă, arcul pare să-și mărească forța de mii de ori. Dar acesta este același volant super-centru, numai că nu toate turele sale sunt fixate - cele interioare încep să joace rolul de spire cu arc (Fig. 82). Astfel de supervolante „moale” sau „de primăvară”, inventate de autorul acestor linii, au fost deja create, deși până acum sub formă de prototipuri, dar testele și-au arătat performanța. Cu o astfel de volantă „moale” puteți accelera mașina fără a utiliza o transmisie variabilă continuu; De asemenea, este posibilă recuperarea (reutilizarea) energiei în timpul frânării și coborârii. Desigur, un astfel de volant „moale” nu poate înlocui complet un grup motopropulsor hibrid cu un super volant și o transmisie continuu variabilă.
 Orez. 82. Super volantă „moale”.
Orez. 82. Super volantă „moale”.Dar pentru o mașină de curse, de exemplu, un astfel de volant este un cadou. Imaginați-vă că chiar și un volant atât de mic și cântărind aproximativ 10 kg poate oferi o putere suplimentară de sute de kilowați în 10-15 secunde, ceea ce ar ajuta, de exemplu, Formula 1 să-și depășească rivalii în manevre. Calculele au arătat că o mașină de curse, echipată cu același motor ca și alte mașini, dar completată cu un volant „moale”, ar fi invincibilă.
Există un singur lucru care poate interfera cu acest lucru – regulile competiției, care sunt foarte stricte. Dar despre dimensiunea și designul volantului, care în principiu este echipat cu fiecare motor, nu există încă un cuvânt! Grăbiți-vă, sportivi!
„Mașina cu mișcare perpetuă” se rotește?
Din anumite motive, posibilitatea de a crea „mașini cu mișcare perpetuă” a fost asociată cu rotația încă din Evul Mediu. O „mașină cu mișcare perpetuă” este un mecanism imaginar care se mișcă în mod continuu și, în plus, face alte lucrări utile (de exemplu, ridică o sarcină, pompează apă etc.). Nimeni nu a reușit încă să construiască așa ceva, deși s-au făcut încercări din cele mai vechi timpuri. Inutilitatea acestor încercări a condus oamenii la convingerea fermă că o „mașină cu mișcare perpetuă” este imposibilă și la stabilirea binecunoscutei legi a conservării energiei - afirmația fundamentală a științei moderne.
În fig. 83 prezintă unul dintre cele mai vechi proiecte ale unei „mașini cu mișcare perpetuă” de acțiune rotațională, care este încă inventată de fanatici (sau, după cum se spune acum, fanii) acestei idei. Tijele pliabile cu greutăți la capete sunt atașate la periferia roții. În orice poziție a roții, greutățile din partea dreaptă vor fi aruncate mai departe de centru decât din stânga, iar această jumătate trebuie să tragă întotdeauna de stânga, făcând roata să se rotească pentru totdeauna. Între timp, dacă faci un astfel de motor, acesta nu se va roti. Care este greșeala inventatorului?
 Orez. 83. „Mașinărie cu mișcare perpetuă” medievală cu tije
Orez. 83. „Mașinărie cu mișcare perpetuă” medievală cu tijeDeși greutățile din partea dreaptă sunt întotdeauna înclinate mai departe de centru, numărul acestor greutăți este mai mic decât cel din stânga. De exemplu, în dreapta sunt 4 greutăți și în stânga 8. Întregul sistem este echilibrat, roata nu se va roti, dar se va opri după ce se va balansa înainte și înapoi de câteva ori.
Deja în secolul dinaintea trecutului s-a dovedit că este imposibil să construiești un mecanism veșnic autopropulsat care încă funcționează. Lucrul la o astfel de sarcină este o sarcină fără speranță. În Evul Mediu, oamenii au petrecut mult timp și muncă pentru a inventa o „mașină cu mișcare perpetuă” (în latină - perpetuum mobile), dar totul în zadar.
Marele nostru mecanic I.P. Kulibin, care a creat multe invenții, și în special primul cărucior cu volantă - „căruciorul cu rulare automată”, a petrecut mult timp și efort pentru a construi „mașini cu mișcare perpetuă”. Dacă un om atât de mare, care era bine versat în mecanică, era angajat în această chestiune, atunci ce ar putea face o persoană mai puțin competentă?
Au fost inventate multe „mașini cu mișcare perpetuă”, dar, firește, nu au funcționat. În fiecare caz, inventatorii au pierdut din vedere o împrejurare care a încurcat tot ceea ce plănuiseră.
Iată un alt exemplu de mașină ireală cu mișcare perpetuă: o roată cu bile grele care se rostogolesc în ea (Fig. 84). Inventatorul credea că bilele, situate pe o parte a roții, mai aproape de margine, vor face roata să se învârtă cu greutatea lor. Desigur, acest lucru nu se va întâmpla - din același motiv ca în cazul precedent.
 Orez. 84. „Mașinărie cu mișcare perpetuă” cu bile grele
Orez. 84. „Mașinărie cu mișcare perpetuă” cu bile greleDe foarte multe ori, rotația volantelor, în special a celor plasate în vid și suspendate pe rulmenți magnetici, care se rotesc timp de multe zile, evocă o analogie cu o „mașină cu mișcare perpetuă”. Dar, în același timp, un astfel de volant nu face nicio muncă utilă; pur și simplu se învârte, consumând încet energia stocată.
Apropo, când vezi cum se rotește volantul, ai senzația că greutatea acestuia scade. Cântărirea unor astfel de discuri volante rotative a dat același rezultat - discul rotativ cântărea mai puțin decât cel staționar. Aerodinamica este de vină aici - discul rotativ alungă aerul, creând un vid la ambele capete. De jos, acest vid atrage solzii, apăsând-o pe vârful discului, iar în sus, vidul trage liber discul (vezi diagrama din Fig. 85). Iată motivul „antigravitației”, despre care s-a scris și s-a vorbit atât de mult.
 Orez. 85. De ce cântărește mai puțin un volant rotativ decât unul staționar: 1 – volant; 2 – cântare
Orez. 85. De ce cântărește mai puțin un volant rotativ decât unul staționar: 1 – volant; 2 – cântareTrebuie spus că creează un efect „anti-gravitație” și un volant care se rotește chiar și în vid. Acest lucru a derutat oamenii chiar și cu diplome avansate. Acesta este un fenomen mult mai „subtil”. Cert este că, din cauza frecării în prismele (suporturile) cântarilor, un corp care vibra întotdeauna va părea mai ușor decât același staționar. Și un volant rotativ vibrează întotdeauna cel puțin puțin din cauza dezechilibrului.
Dar să revenim la „mașinile cu mișcare perpetuă”. Unul dintre cei mai de succes creatori de „mașini cu mișcare perpetuă”, care a trăit până la sfârșitul zilelor din veniturile primite pentru demonstrarea mașinii sale, a fost germanul Besler, care a cântat sub pseudonimul Orfireus (1680-1745). Așa a vorbit despre această invenție faimosul popularizator al științei Ya. I. Perelman.
Desenul atașat (Fig. 86), împrumutat dintr-o carte veche, arată mașina lui Orfireus așa cum era în 1714. Vedeți o roată mare, care părea că nu numai că se rotește de la sine, ci și ridică o sarcină grea la o înălțime considerabilă.
 Orez. 86. „Roată autopropulsată” de Orfireus, pe care Petru I aproape că l-a cumpărat (desen antic)
Orez. 86. „Roată autopropulsată” de Orfireus, pe care Petru I aproape că l-a cumpărat (desen antic)Faima minunatei invenții, pe care savantul doctor a arătat-o pentru prima dată la târguri, s-a răspândit rapid în toată Germania; Orfireus a dobândit în curând patroni puternici. Regele polonez a devenit interesat de el, apoi landgravul de Hesse-Kassel. Acesta din urmă i-a oferit inventatorului încuietoarea și a testat mașina în toate modurile posibile.
Așadar, în 1717, la 12 noiembrie, motorul, aflat într-o încăpere retrasă, a fost pus în funcțiune; camera a fost apoi încuiată, sigilată și lăsată sub paza atentă a doi grenadieri. Timp de 14 zile nimeni nu a îndrăznit nici măcar să se apropie de încăperea în care se învârtea misterioasa roată. Abia pe 26 noiembrie au fost îndepărtate sigiliile, iar landgravul și alaiul lui au intrat în incintă. Si ce? Roata încă se învârtea „cu viteză neclintită”. Mașina a fost oprită, inspectată minuțios și apoi repusă în funcțiune. Timp de 40 de zile, localul a rămas din nou sigilat; Grenadierii au stat de pază la ușă timp de 40 de zile. Iar când au fost deschise sigiliile la 4 ianuarie 1718, comisia de expertiză a găsit roata în mișcare!
Nici Landgraf nu a fost mulțumit de asta: a fost făcut un al treilea experiment - motorul a fost sigilat timp de 2 luni întregi. Și totuși, după termenul limită, a fost găsit în mișcare!
Inventatorul a primit de la admiratorul landgrav un certificat oficial că „mașina sa cu mișcare perpetuă” face 50 de rotații pe minut, este capabilă să ridice 16 kg la o înălțime de 1,5 m și poate, de asemenea, să opereze un burduf de fierar și o mașină de șlefuit. Cu acest certificat, Orfireus a călătorit prin Europa. Probabil că a primit un venit decent dacă a acceptat să-și cedeze mașina lui Petru I pentru nu mai puțin de 100 de mii de ruble.
Vestea unei astfel de invenții uimitoare a doctorului Orfireus s-a răspândit rapid în toată Europa, pătrunzând cu mult dincolo de granițele Germaniei. A ajuns și la Petru, interesându-l foarte mult pe țar, care era lacom de tot felul de „planuri viclene”.
Petru a atras atenția asupra roții lui Orfireus încă din 1715, în timpul șederii sale în străinătate, și, în același timp, l-a instruit pe A. I. Osterman, un celebru diplomat, să cunoască mai bine această invenție; acesta din urmă a trimis curând un raport detaliat despre motor, deși nu a putut să vadă mașina în sine. Petru avea de gând să-l invite chiar pe Orfireus, ca un inventator remarcabil, în slujba lui și a poruncit să ceară părerea lui Christian Wolf, un renumit filozof al vremii (profesorul lui Lomonosov), despre el.
Celebrul inventator a primit oferte măgulitoare de pretutindeni. Cei mari ai acestei lumi l-au copleșit cu înalte favoruri; poeţii au compus ode şi imnuri în cinstea minunatei sale roţi. Dar au existat și răi care bănuiau aici o înșelăciune pricepută. Au existat suflete curajoase care l-au acuzat deschis pe Orfireus că a înșelat; Un premiu de 1 mie de mărci a fost oferit oricui a demascat înșelăciunea. Într-unul din pamfletele scrise cu scop acuzator, găsim aici reprodus un desen. Secretul „mașinii cu mișcare perpetuă”, conform anunțului, constă pur și simplu în faptul că o persoană ascunsă cu pricepere trage o frânghie, neobservată de observatori, pe o parte a axei roții ascunsă în suport (Fig. 87). .
 Orez. 87. Dezvăluirea secretului roții Orfireus (desen de epocă)
Orez. 87. Dezvăluirea secretului roții Orfireus (desen de epocă)Înșelătoria subtilă a fost descoperită întâmplător doar pentru că „medicul învățat” s-a certat cu soția și servitoarea sa, care erau la cunoștință de secretul său. Dacă acest lucru nu s-ar fi întâmplat, probabil că am rămâne nedumeriți în legătură cu „mașina cu mișcare perpetuă” care a făcut atât de mult zgomot. Se pare că „mașina cu mișcare perpetuă” a fost pusă într-adevăr în mișcare de oameni ascunși care au tras imperceptibil un cordon subțire. Acești oameni erau fratele inventatorului și servitoarea lui.
Dar adevărații oameni de știință, chiar și din acele vremuri, erau ferm împotriva „mașinilor cu mișcare perpetuă”. Trimisul lui Petru I, Schumacher, pe care împăratul l-a instruit să studieze problema „mașinilor cu mișcare perpetuă”, a scris la Sankt Petersburg că oamenii de știință francezi și englezi „respectează toate aceste mobile perpetue ca pe nimic și spun că sunt împotriva principiilor matematice. ”
Perpetuum mobile cu chip uman
Nu este clar de ce oamenii au depus atât de mult efort căutând o „mașină cu mișcare perpetuă” atunci când în jur există o mare inepuizabilă de energie. Nu este mai ușor să instalezi o moară de vânt și să o folosești pentru a primi energie eoliană gratuită decât să-ți petreci viața creând cele mai complexe și, cel mai important, inoperabile „mașini cu mișcare perpetuă”? Într-o perioadă în care Kulibin își irosea în mod inutil viața și talentul pe mașini cu mișcare perpetuă, morarii măcinau cereale folosind energia absolut liberă și gratuită de la vânt și apa curgătoare.
Dar din moment ce vorbim despre mecanisme „miraculoase”, vom continua acest subiect. Știm deja că corpul nu se poate mișca singur prin forțe interne. Dar se poate aduce în rotație cu aceleași forțe interne? Conform legilor mecanicii, întrebarea necesită un răspuns puternic negativ. Dar haideți să facem un experiment simplu care pare să demonstreze contrariul. Pentru a face acest lucru, avem nevoie de un dispozitiv numit platformă Zhukovsky sau bancă (vezi Fig. 53). Acestea sunt de obicei disponibile în școli în sălile de fizică, dar nu este greu să faci unul singur, cel puțin din două discuri de lemn, o axă de metal și doi rulmenți. Discurile „Grace” vândute în magazine sunt nepotrivite aici din cauza rezistenței mari la rotație.
Deci, prima experiență. Să stăm pe banca lui Jukovski și să încercăm să ne relaxăm. Dacă rezistența în rulmenți este foarte mică (și acesta este exact genul de dispozitiv de care avem nevoie!), nimic nu va funcționa. Ne mișcăm mâinile la dreapta, noi înșine ne mișcăm la stânga. Ne întoarcem mâinile la locul lor inițial, iar trunchiul își ia poziția anterioară. S-ar părea că totul este în cadrul legilor mecanicii.
Dar încercați această experiență. Mutați-vă mâna dreaptă în lateral, de preferință cu un fel de greutate - o gantere, un fier etc., și mutați-o brusc spre stânga. Trunchiul se va roti de la stânga la dreapta. Apoi ridicați cu atenție aceeași mână în sus și, trecând-o prin partea superioară în planul axei de rotație, coborâți-o în direcția opusă. Apoi repetați prima mișcare din nou. Continuând să efectuăm aceste exerciții aparent ridicole, ne îndreptăm constant cu propriile noastre forțe interne în aceeași direcție, încălcând în mod clar legile mecanicii.
Și a doua experiență, cu adevărat șocantă la prima vedere. Așezați banca Zhukovsky ușor înclinată, așezând, de exemplu, o carte, o tabletă sau un obiect similar sub ea pe o parte. Înclinarea discului ar trebui să fie de aproximativ 5°. Apoi stai pe acest disc si vei simti... ca incepi sa te relaxezi! Singur, fără ajutor din exterior sau mișcări ale corpului. De obicei, este imposibil să stai pe un astfel de disc mai mult de un minut, iar o persoană cade la podea în cele mai ridicole ipostaze.
Când autorul și-a făcut pentru prima dată o bancă Zhukovsky și a așezat-o pe hol, unde podeaua era neuniformă, el a experimentat el însuși această „desfășurare”. Fiind profesor de mecanică și necrezând în miracole, autorul și-a petrecut aproape toată noaptea sărind pe disc, care, bineînțeles, l-a învârtit și cu siguranță l-a căzut la podea. Până dimineață, autorul făcuse două lucruri importante: în primul rând, a învățat să rămână pe „auto-desfășuratorul” inventat și, în al doilea rând, a înțeles de ce se întâmplă toate acestea.
„The Self-Unwinder” a făcut o impresie atât de uimitoare asupra „experimentatorilor”, încât a fost difuzat la televizor, unde autorul de pe stradă a invitat trecătorii să stea pe disc și să țină. Niciunul dintre trecători nu a putut face asta, iar autorul a numit în glumă acest dispozitiv „mașină cu mișcare perpetuă”.
Televiziunea este o forță teribilă; milioane de oameni îl urmăresc. Curând autorul a fost bombardat cu scrisori la care, chiar dacă ar fi vrut, nu le-a putut răspunde. Toți au cerut să le vândă o „mașină cu mișcare perpetuă”. Cine pentru ce - iluminarea apartamentului, amestecarea untului, alte nevoi casnice. Trebuie să spunem adevărul: autorul a vândut mai multe discuri. Dar nu ca o „mașină cu mișcare perpetuă”, ci ca o atracție. Mai mult, a fost cumpărat de antreprenori din SUA și alte țări străine.
În următorul program (a existat un astfel de program de televiziune științific și educațional „You Can Do It”), autorul a vorbit deja în detaliu despre structura acestei „mașini cu mișcare perpetuă” și despre principiul funcționării acesteia. Aici era.
Cert este că, stând oblic, o persoană încearcă instinctiv să se îndrepte, să devină verticală. În acest caz, presiunea tălpilor persoanei asupra discului se schimbă în jumătatea sa superioară (nu uitați că discul este înclinat!) și, desigur, se rotește. Acest disc este ca o scară înclinată; dacă „simte” supraîncărcarea unui „bol” (jumătate din disc), îl coboară imediat și ridică bolul gol. Persoana încearcă automat să se îndrepte din nou și pune din nou presiune pe jumătatea superioară. Și așa mai departe până când discul îl aruncă la podea din cauza rotației rapide. Desigur, o greutate sau o statuie a unei persoane plasate pe un disc va rămâne nemișcată pe ea. Așa, stând ca o statuie, autorul a învățat să stea pe disc dimineața...
Acesta este principiul de funcționare al unei „mașini cu mișcare perpetuă” „cu chip uman”. Acum despre prima experiență. Autorul a complicat-o în mod special, făcând mișcări complicate cu mâna pentru a fi mai greu de ghicit. De asemenea, puteți roti astfel: răsuciți mâna cu o sarcină deasupra capului. În acest caz, corpul se va roti în cealaltă direcție în conformitate cu toate legile mecanicii. Este „fața umană” care îi încurcă pe toți aici. „Fața umană” se întoarce, ceea ce înseamnă că există rotație și pare că persoana se întoarce fără aplicarea de forțe externe. La urma urmei, o mână cu o sarcină nu are „față”, așa că nu considerăm mișcarea ei ca fiind rotație, dar în zadar... Cea mai comună rotație în jurul unei axe. Apropo, atunci când pisicile cad, așa își mențin echilibrul căzând în labe. La începutul căderii, chiar și cu spatele în jos, pisica evaluează automat unde este mai aproape și mai convenabil să se întoarcă și apoi începe să-și rotească rapid coada proeminentă în direcția opusă. Corpul, desigur, se întoarce spre celălalt... Așa se folosește acest animal drăguț de legile mecanicii.
Dar să ne imaginăm că încă vrem să primim energie de la o persoană. Nu prin rotirea pe disc, desigur, ci, de exemplu, prin rotirea pedalelor conectate la generator. Apropo, se citește adesea astfel de propoziții chiar și în literatura serioasă. Omul obișnuit, judecând după conținutul de calorii al alimentelor pe care le mănâncă și al băuturilor pe care le bea (apropo, chiar și vodca este foarte bogată în calorii!), ar putea încălzi ușor apartamentul. Dar nu iluminați, deoarece aceasta va necesita o putere de 150-300 W. Și o astfel de putere pe tot parcursul zilei este de 6-8 ore și nu orice cal o poate face față.
Într-adevăr, pentru a determina standardul de putere, unul dintre cei mai puternici cai a fost împins la moarte în timp ce dezvolta o putere de 1 cal putere (736 W) pe parcursul mai multor ore.
Acum să vorbim despre persoană. Ce este 150 W în raport cu o persoană? Aceasta este o greutate de un kilogram ridicată de la sol la un braț întins (smucitură) la fiecare 2 secunde în mod continuu; centrul de masă al greutății crește cu aproximativ 2 m. Autorul însuși nu este o persoană slabă, un halterofil, se antrenează în mod regulat, dar după 3 minute de astfel de muncă transpira deja de la sarcină. Încearcă același lucru, măsoară timpul în care stăpânești acest exercițiu, apoi împarte 6 - 8 ore la timpul rezultat, exprimat în ore. Sunt sigur că veți obține o cifră cu două sau chiar trei cifre. Iată de câte ori capacitățile umane sunt exagerate.
O persoană poate tolera mai puțină putere mai ușor. Cel mai bine este să le măsurați pe o bicicletă de exerciții, unde la dispozitivele moderne puterea este afișată direct pe afișaj, iar la modelele mai vechi simplificate instrumentele (dinamometru și vitezometru) arată forța și viteza raportate la janta roții simulatorului. Exprimați forța în newtoni și viteza în metri pe secundă și înmulțiți forța cu viteza pentru a obține puterea în wați.
Cum rămâne cu puterea medie peste, de exemplu, 7 ore? Stați pe o bicicletă staționară și încercați să dezvoltați o putere constantă pe o perioadă de timp. Acest lucru se poate face de fapt prin plasarea dinamometrului la o sarcină constantă și menținerea unei viteze constante a pedalei folosind un vitezometru. Apoi, înmulțiți puterea rezultată cu timpul în care lucrați pentru a finaliza munca în jouli. Pe simulatoarele moderne scumpe, această cifră este obținută automat chiar și cu sarcină variabilă. Lucrând și odihnindu-te timp de 7 ore, tu, însumând cantitatea de muncă rezultată, determinați munca pe care ați efectuat-o în 7 ore, adică în 25.200 de secunde. Împărțiți munca în jouli la timpul în secunde pentru a obține puterea în wați. Nu vă supărați dacă obțineți o putere medie foarte mică, așa este. Dacă, desigur, nu ești campion olimpic la ciclism.
Apropo, despre campioni. Oamenii foarte puternici (de exemplu, halterofilii), atunci când smucind o mreană, pot dezvolta 1,5 - 2 kW, dar foarte scurt - 2 - 3 secunde, nu mai mult. Și puterea medie a unei persoane obișnuite timp de 6 - 8 ore, din păcate, este foarte aproape de puterea unei lanterne și este egală cu doar câțiva wați. Un biciclist cu mișcare lentă dezvoltă 20 de wați, dar încearcă să mergi continuu timp de 7 ore!
Între timp, în cărțile de referință de fizică trebuie să citiți că puterea medie umană este exact de 150-300 W. Așa că rețineți că această putere nu este mecanică, ci mai ales termică. Să presupunem că o gospodină mătură o cameră: cheltuiește aproximativ 20 W pe lucrări mecanice, iar restul pe încălzirea camerei!
Deci nu te poți baza pe nicio putere umană semnificativă, de exemplu, pentru a muta mașini musculare mari, avioane musculare etc.!
Este posibil să se schimbe axa pământului?
Să ne întoarcem din nou pe Pământul nostru. Știm deja că axa Pământului este înclinată față de planul revoluției sale în jurul Soarelui, știm că precesează, știm să determinăm direcția de precesie și momentul giroscopic. Și cu astfel de cunoștințe, putem încerca să obținem energie chiar și din rotația Pământului. Luna încă încetinește Pământul și cheltuiește toată energia rotației sale pe fluxul și refluxul oceanelor. Deci, să încercăm să „luăm” măcar o parte din această energie.
Să ne imaginăm un volant uriaș la polul Pământului, care se rotește într-un plan perpendicular pe planul de rotație al Pământului. Dacă volantul a rezistat pur și simplu pasiv oricărei modificări a poziției axei în spațiu, atunci planul de rotație ar rămâne nemișcat, iar Pământul s-ar roti în jurul lui. Această rotație relativă ar putea fi captată de generatoare și am primi electricitate gratuită.
Acest proiect este, desigur, ușor de expus. Știm deja că un volant rotativ nu doar rezistă pasiv rotației axei sale, ci precesează. Și această precesie va alinia foarte curând axa de rotație a volantului cu axa de rotație a Pământului, iar apoi extragerea energiei se va termina.
 Orez. 88. Proiect de utilizare a energiei de rotație a Pământului: volant pe un arc
Orez. 88. Proiect de utilizare a energiei de rotație a Pământului: volant pe un arcIată un alt proiect care nu este atât de ușor de expus. Volanul se așează într-un cadru pe un arc de torsiune și, oscilând, se rotește într-un sens sau altul (Fig. 88). Pentru simplitate, vom neglija pierderile din primavara si pierderile aerodinamice. Deci, atunci când volantul se rotește într-o direcție, va precesa într-o direcție, iar când rotația se schimbă, va precesa în cealaltă. Această precesie va avea loc sub influența rotației Pământului. Prin urmare, energia poate fi „înlăturată” din rotația relativă în mod constant, deoarece axa de rotație a volantului nu va coincide niciodată cu axa de rotație a Pământului?
Acest lucru, se pare, nu se poate face, deoarece atunci când arcul este deformat, axa de rotație a volantului se va schimba și va apărea un moment care compensează momentul frânării Pământului.
 Orez. 89. Experimente cu răsturnarea unui volant gigant
Orez. 89. Experimente cu răsturnarea unui volant gigantSau o experiență complet simplă. Să ne imaginăm că la polul Pământului există un volant uriaș, care se rotește cu aceeași viteză unghiulară ca Pământul însuși, adică staționar față de acesta. Și apoi vom roti volantul cu 180° folosind un mecanism puternic din axa din rulmenți și îl vom aduce din nou mai aproape de Pământ (Fig. 89). În acest caz, volantul se va roti în cealaltă direcție, iar viteza relativă de rotație a acestuia va fi de 2 rotații pe zi. Și această viteză poate fi „înlăturată” cu ușurință de pe volant, cheltuind-o pe muncă. Volanul se va opri din nou, viteza lui va fi egală cu viteza Pământului, apoi o vom întoarce din nou etc. Deci, putem opri treptat Pământul folosind energia sa cinetică? Va fi cu adevărat „distrusă” inerția de rotație a Pământului fără nicio influență externă, prin mijloace interne?
Normal că nu. Explicația pentru acest paradox este că, prin întoarcerea volantului, provoacă un moment giroscopic care accelerează Pământul exact la fel de mult cât va încetini atunci când intră în contact cu volantul. Deci viteza de rotație a Pământului atunci când volantul se întoarce nu se va schimba în niciun fel, deși energia va fi cheltuită pentru întoarcerea lui, dar se va transforma complet în căldură atunci când volantul intră în contact cu Pământul.
Acum este clar că nu puteți obține energie din rotația Pământului prin mijloace „interne”. Deci, este chiar posibil să accelerăm sau să încetiniți rotația Pământului cu capacități interne?
Trebuie spus că aceasta este o problemă de natură filozofică mai degrabă decât mecanică. Judecând după cea precedentă, ne putem răsuci trunchiul într-o direcție în timp ce ne rotim brațul în cealaltă. Dacă nu considerăm că mâna este proprietatea noastră, atunci putem spune că ne putem promova prin eforturile noastre interne.
Așa este și cu Pământul. Orice pas pe care îl facem, orice mașină care se deplasează pe suprafața Pământului crește sau scade viteza de rotație a acestuia, dar foarte puțin. Este posibil să faci mult mai mult?
Poate sa. Dacă, de exemplu, creați un curent oceanic precum Fluxul Golfului, dar de-a lungul ecuatorului (unde este posibil, de exemplu, în Oceanul Pacific) și trecând neapărat într-o singură direcție, fie de-a lungul rotației Pământului, fie impotriva. Acest lucru poate fi imaginat doar până acum în Oceanul Pacific, atunci acest curent ar trebui să se deplaseze în Oceanul Indian, ceea ce este destul de ușor de făcut prin strâmtorile din insulele Oceaniei, atunci va fi necesar fie să ocolești Africa dinspre sud. , sau pentru a extinde mult Canalul Suez, Gibraltar și strâmtoarea Bab el-Mandeb, atunci cel mai bine este să lăsați curentul să curgă prin Canalul Panama, extinzându-l în toată America Centrală. Ei bine, un obiectiv grozav - costuri mari!
Dar, după ce a început curentul împotriva rotației Pământului, vom folosi contracararea, așa-numitul moment „reactiv” (în același mod în care un burghiu puternic ne răsuceste brațele!), pentru a învârti Pământul mai repede. Ne putem apropia de acele zile de 9 ore care au existat la originea vieții pe Pământ.
Cu mai puțină cheltuială de energie, putem seta curentul să urmeze rotația Pământului, adică de la vest la est, și să încetinească rotația planetei. Putem, în principiu, să facem o zi egală cu un an, iar apoi pământul Pământului va fi întors spre Soare pe o parte cu toate consecințele care decurg atât pentru această parte, cât și pentru cealaltă, care va rămâne în umbră. .
Dar dacă ne preocupă mediul înconjurător și nu dorim să creăm noi curenți oceanici, atunci cea mai ușoară cale este să instalăm în Antarctica (cel puțin acolo există pământ), de preferință subteran, cu aer pompat din acest subteran, un volant uriaș realizat. a unor materiale grele pe rulmenți magnetici uriași (Fig. 90). Tehnic, desigur, toate acestea se pot face, dar care vor fi costurile? Și atunci va fi necesar să învârți acest volant într-o direcție sau alta pentru a accelera sau decelera Pământul. În acest caz, atât pământul cât și apa se vor deplasa împreună.
 Orez. 90. Superflywheel în adâncurile Antarcticii
Orez. 90. Superflywheel în adâncurile AntarcticiiȘi, în sfârșit, întrebarea sacramentală despre schimbarea axei Pământului, ce au vrut să facă eroii lui Jules Verne cu o lovitură dintr-un supertun. Ei bine, și acesta poate fi aranjat folosind aceiași curenți oceanici, doar în direcția meridională, de exemplu, aducând Gulf Stream pe partea opusă și prin Oceanul Pacific, ocolind Antarctica, închizând-o în Golful Mexic. Dar acest lucru este rău pentru Rusia - atunci Polul Nord va începe să „atace” teritoriul nostru și să-l înghețe complet.
Puteți trimite acest curent pe aceeași cale, dar în cealaltă direcție, apoi Polul Nord se va deplasa spre regiunea canadiană și mai departe spre SUA. Și dacă măcar suntem obișnuiți cu frigul, atunci ce vor face locuitorii Americii iubitoare de căldură?
Este posibil să „îndreptați” axa Pământului și să eliminați schimbarea anotimpurilor. Va fi întotdeauna vară la ecuator, iarnă la poli și un amestec de toamnă și primăvară între ele. Devine cam plictisitor!
 Orez. 91. Volant pentru rotirea axei Pământului (diagrama)
Orez. 91. Volant pentru rotirea axei Pământului (diagrama)Toate cele de mai sus pot fi obținute folosind același volant subteran, numai cel mai bine instalat la ecuator (Fig. 91). În Africa, de exemplu, sau în junglele Americii de Sud - este suficient spațiu! Este posibil aici, în Siberia – există și mai mult spațiu acolo, dar efectul va fi de aproximativ 1,5 ori mai slab. Latitudinile sunt greșite!
Desigur, toate acestea sunt manipularea orientării Pământului și a vitezei sale unghiulare, bazate pe capacitățile noastre fundamentale interne. Natura realizează toate acestea cu propriile sale forțe „externe” și fără dorința noastră.
Se poate spune un lucru pentru a-i consola pe cei care sunt revoltați de aceste manipulări ale Pământului. Chiar dacă noi, pământenii, suntem capabili să construim aceste volante gigantice, nu vom găsi acele resurse energetice colosale care ar putea învârti aceste volante. Dacă, desigur, nu ne întărim energia de sute și mii de ori!