Pentru a înțelege ce studiile mecanice, este necesar să se ia în considerare ce înseamnă mișcarea în cel mai general sens. Valoarea acestui cuvânt implică o schimbare în ceva. De exemplu, o mișcare politică pledează egalitatea diferitelor straturi ale populației, indiferent de afilierea lor rasială. Anterior, nu a fost, atunci ceva schimbat și acum fiecare persoană are drepturi egale. Aceasta este mișcarea civilizației viitoare. Un alt exemplu este de mediu. În trecut, alegerea în natură, nimeni nu sa gândit la ceea ce lasă gunoi după el însuși. Astăzi, orice persoană civilizată îl va colecta cu el și îl va lua într-un loc special desemnat pentru eliminarea ulterioară.
Ceva de genul acesta poate fi observat în mecanică. Cu mișcare mecanică, poziția corpului se schimbă în spațiu în raport cu alte elemente în timp. Principala sarcină a mecanicii este de a indica locul în care obiectul este în orice moment, luând în considerare chiar și cel care nu a venit încă. Adică să prezică poziția corpului la un moment dat, și nu doar să aflu unde a fost în trecut.
Kinematica este o secțiune a mecanicii care studiază mișcarea corpului fără a-și analiza cauzele. Aceasta înseamnă că ea învață să nu explice, ci să descrie. Adică, veniți cu un mod cu care ar fi posibil să setați poziția corpului în orice moment. Conceptele de bază ale cinematicii includ viteza, accelerația, distanța, timpul și mișcarea.
Dificultate în descrierea mișcării
Prima problemă cu care se confruntă cinematica este că fiecare organism are o anumită dimensiune. Să presupunem că este necesar să descrieți mișcarea unui obiect. Aceasta înseamnă să înveți cum să-i desemnezi poziția în orice moment. Dar fiecare element are un loc în spațiu. Asta este că toate părțile acestui obiect în același punct în timp ocupă o poziție diferită.

Ce punct în acest caz trebuie luat pentru a descrie localizarea întregului subiect? Dacă luați în considerare fiecare, atunci calculele vor fi prea complexe. Prin urmare, decizia de a răspunde la această întrebare poate fi ușor simplificată. Dacă toate punctele unui corp se mișcă în aceeași direcție, este suficient să descrieți mișcarea pe care o conține acest corp.
Tipuri de mișcare în cinematică
Există trei tipuri:
- Există o mișcare progresivă, în care orice direct petrecut în organism rămâne paralel cu el însuși. De exemplu, o mașină care se mișcă de-a lungul autostrăzii face un astfel de mișcare.
- Rotația se numește o astfel de mișcare a corpului în care toate punctele sale se mișcă în jurul cercurilor cu centrele situate pe o linie dreaptă, numită axa de rotație. De exemplu, rotirea pământului în raport cu axa sa.
- Oscilatorul este mișcarea în care organismul își repetă traiectoria printr-o anumită perioadă de timp. De exemplu, mișcarea pendulului.
Concepte de bază ale cinematicii - punct material
Orice mișcare complexă poate fi descrisă ca o combinație de două specii simple - progresivă și rotativă. De exemplu, o roată de vehicul sau Yula, în picioare pe o mișcare directă, participă simultan în aceste două tipuri de mișcare.

Dar dacă mișcarea corpului nu poate fi trimisă ca o combinație? De exemplu, dacă mașina se îndreaptă spre un drum bumpy, poziția sa se va schimba foarte dificilă. Dacă calculați numai faptul că acest transport se deplasează de la un oraș la altul, atunci într-o astfel de situație nu contează ce dimensiune corpul se mișcă de la punctul A până la punctul B și pot fi neglijate. În acest caz, este important doar pentru ce masina a trecut o anumită distanță și la ce viteză se mișca.
Cu toate acestea, ar trebui să se țină cont de faptul că neglijarea dimensiunii nu este permisă în fiecare sarcină. De exemplu, dacă calculați mișcarea în parcarea mașinii, ignorarea amplorii acestui corp va duce la o consecință dăunătoare. Prin urmare, numai în acele situații în care, într-o anumită sarcină, dimensiunile obiectului în mișcare pot fi neglijate, atunci un astfel de organism se numește un punct material.
Formule Kinematics.
Numerele prin care poziția punctului este setată în spațiu se numește coordonate. Pentru a le determina pe o linie dreaptă, doar un număr când vine vorba de suprafață, apoi două, despre spațiul - trei. Nu sunt necesare mai multe numere în lumea tridimensională (pentru a descrie poziția punctului material).

Există trei ecuații de bază pentru conceptul de cinematică, ca o secțiune privind mișcarea telului:
- v \u003d u + la.
- S \u003d UT + 1 / 2AT 2.
- v 2 \u003d U 2 + 2A.
v \u003d viteza maximă,
u \u003d viteza inițială
a \u003d Accelerare
s \u003d Distanța parcursă de corp
Formulele cinematice în spațiul unic dimensional:
X - x o \u003d v o t + 1 / 2a t2
V 2 \u003d V O 1 + 2A (X - X o)
X - x o \u003d 1 \\ 2 (V O + V) T
Unde,
V - viteza finală (m / s),
V o - viteza inițială (m / s),
a - Accelerația (m / s 2),
t - timpul (orele),
X - poziția finală (m),
Formule cinematice în spațiu bidimensional
Deoarece următoarele ecuații sunt folosite pentru a descrie punctul material pe plan, merită luarea în considerare axa X și Y.
Având în vedere direcția x:
a x \u003d. constant.
V fx \u003d v i x + a x Δt
X F \u003d X I + V I x ΔT + 1 / 2A X ΔT 2
Δt \u003d v fx -V ix / a x
V FX 2 \u003d V IX 2 + 2AX Δx
X F \u003d x I + 1/2 (V FX + V IX) Δ T.
Și luând în considerare Y:
a y \u003d. constant.
V fy \u003d v iy + a y Δt
y f \u003d y i + v Δt + 1/2 A x Δt 2
Δt \u003d v FY - V IY / A Y
V FY 2 \u003d V IY 2 + 2 AY Δ Y
y f \u003d y i +1/2 (v fy + v iy) Δt.
V F - viteza finală (m / s),
V I - viteza inițială (m / s),
a - Accelerare (m / c 2),
t - timpul (orele),
X - poziția finală (m),
X 0 - Poziția inițială (M).
Deplasați proiectilul abandonat este cel mai bun exemplu pentru a descrie mișcarea obiectului în două dimensiuni. Aici corpul se mișcă, atât în \u200b\u200bpoziția verticală a Y, cât și în poziția orizontală x, astfel încât putem spune că obiectul are două viteze.
Exemple de sarcini cinematice
Sarcina 1.: Viteza inițială a camioanelor este zero. Inițial, acest obiect este în repaus. Începe să acționeze o accelerație uniformă în intervalul de timp de 5,21 secunde. Distanța parcursă de camion este de 110 m. Găsiți accelerația.
Decizie:
Distanța s \u003d 110 m a trecut
Viteza inițială v I \u003d 0,
Timp t \u003d 5.21 s,
Accelerare a \u003d?
Folosind conceptul de bază și formula de cinematică, se poate concluziona că
s \u003d V I T + 1/2 A T 2,
110 m \u003d (0) × (5.21) + 1/2 × A (5.21) 2,
a \u003d 8,10 m / s 2.
Sarcina 2: Punctul se deplasează de-a lungul axei X (în cm), după secunde de călătorie, acesta poate fi depus folosind ecuația X \u003d 14T 2 - T + 10. Este necesar să găsiți punctul mediu al punctului, cu condiția ca t \u003d 3s?
Decizie:
Poziția punctului la t \u003d 0 este x \u003d 10 cm.
La t \u003d 3s, x \u003d 133 cm.
Viteza medie, v Av \u003d Δx / Δt \u003d 133-10 / 3-0 \u003d 41 cm / s.
Care este punctul de referință
Pe mișcare se poate spune numai dacă există ceva, cu privire la care se consideră schimbarea poziției obiectului studiat. Un astfel de obiect se numește un corp de referință și este întotdeauna asumat pentru unul fix.
Dacă sarcina nu este specificată în ce sistem de raportare se deplasează punctul de material, terenul implicit este considerat corpul implicit. Cu toate acestea, acest lucru nu înseamnă că pentru un timp fix la un moment dat, obiectul referitor la care se efectuează mișcarea, orice alt convenabil pentru calcul nu poate fi luat. De exemplu, pentru corpul de referință, puteți lua un tren în mișcare, rotirea mașinii și așa mai departe.
Sistemul de referință și valoarea sa în cinematică
Pentru a descrie mișcarea, sunt necesare trei componente:
- Sistem de coordonate.
- Punctul de referință.
- Dispozitiv pentru măsurarea timpului.

Corpul de referință, sistemul de coordonate asociat cu acesta și dispozitivul pentru măsurarea timpului formează un sistem de referință. Este lipsit de sens să vorbim despre mișcare, dacă nu o specifică. Sistemul de referință selectat corect vă permite să simplificați descrierea mișcării și, dimpotrivă, să complicați dacă este selectată.
Din acest motiv, omenirea a crezut că soarele se mișca în jurul Pământului și că era în centrul universului. O astfel de mișcare complexă a luminarilor asociate cu faptul că observatorii pământești se află în sistemul de referință, care este în mișcare foarte complicată. Pământul se rotește în jurul axei sale și, în același timp, în jurul soarelui. De fapt, dacă schimbați sistemul de referință, atunci toate mișcările corpurilor celeste sunt ușor descrise. Acest lucru a fost făcut la un moment dat de Copernicus. El și-a propus descrierea proprie a ordinii mondiale, în care soarele este nemișcat. În ceea ce privește acest lucru, descrierea mișcării planetelor este mult mai ușoară decât dacă corpul este Pământul.

Conceptele de bază ale cinematicii - calea și traiectoria
Permiteți un anumit punct mai întâi în poziția A, după un timp sa dovedit a fi în poziția V. Între ele puteți petrece o linie. Dar, astfel încât acest lucru să transporte mai multe informații despre mișcare, adică era clar de unde și unde se mișca corpul, acesta nu ar trebui să fie doar un segment, ci o direcție, de obicei, denotată de litera S. Mișcarea corpului, este numit un vector realizat din poziția inițială a subiectului în finit.

Dacă corpul a fost inițial la punctul A, și apoi sa dovedit a fi la punctul B, acest lucru nu înseamnă că sa mutat doar într-o linie dreaptă. De la o poziție la alta, puteți obține un număr infinit de moduri. Linia de-a lungul căreia se mișcă corpul, este un alt concept de bază al cinematicii - traiectoria. Iar lungimea sa se numește calea, care este de obicei denotată de literele L sau L.
Sesiunea se apropie și este timpul ca noi să trecem de la teorie la practică. În weekend ne-am așezat și am crezut că mulți studenți ar trebui să aibă o bună formulă fizică la îndemână. Formule uscate cu explicație: Pe scurt, concis, nimic inutil. Lucru foarte util la rezolvarea sarcinilor, știți. Da, și la examen, când poate "sări" din cap, exact că cu o zi înainte de a fi târât, o astfel de selecție va servi servicii excelente.
Cele mai multe sarcini sunt de obicei solicitate cele trei secțiuni cele mai populare ale fizicii. aceasta mecanică, termodinamică și fizica moleculară, electricitate. Și ia-le!
Formule de bază pentru dinamica fizică, cinematică, statică
Să începem cu cele mai simple. Vechile mișcări drepte și uniforme preferate.
Formulele cinematice:
Desigur, nu vom uita de mișcare într-un cerc și apoi vom trece la dinamica și legile lui Newton.

După dinamică, este timpul să se ia în considerare condițiile de echilibru ale corpurilor și lichidelor, adică. Statică și hidrostatică

Acum prezentăm formulele de bază pe tema "Lucrări și energie". Unde suntem fără ei!

Formule principale de fizică moleculară și termodinamică
Vom termina secțiunea de mecanică prin formule pe fluctuații și valuri și vom trece la fizica moleculară și termodinamică.

Coeficientul util, Legea lui Gay-Loursak, ecuația Klapaireron-Mendeleev - toată această inimă drăguță cu formula sunt colectate mai jos.
Apropo! Pentru toți cititorii noștri acum există o reducere 10% pe orice tip de muncă.

Formule de bază pentru fizică: electricitate
Este timpul să vă deplasați la electricitate, chiar dacă iubește mai puțin termodinamică. Începem cu electrostatica.


Și, sub fracțiunea de tambur, terminați formulele pentru legea OMA, inducția electromagnetică și oscilațiile electromagnetice.

Asta e tot. Desigur, ar fi posibil să aducem întreaga formulă montană, dar nu este nimic. Când formulele devine prea mult, puteți să vă confundați cu ușurință și acolo pot topi creierul. Sperăm că foaia de înșelătorie a formulelor de bază în fizică va contribui la rezolvarea mai rapidă și mai eficientă a sarcinilor preferate. Și dacă doriți să clarificați ceva sau nu ați găsit formula necesară: întrebați experții serviciul Student. Autorii noștri păstrează sute de formule în cap și fac clic pe sarcini ca nuci. Contact, și în curând orice sarcină vă va fi "pe dinți".
În primul rând, trebuie remarcat faptul că va fi despre un punct geometric, adică zona de spațiu care nu are dimensiuni. Este pentru această imagine abstractă (model) și toate definițiile și formulele prezentate mai jos. Cu toate acestea, pentru Brevity voi continua să vorbesc despre mișcare corp, obiect sau particule. Aceasta este ceea ce sunt doar pentru a vă ușura să citiți. Dar amintiți-vă întotdeauna că vorbim despre un punct geometric.
Vector de rază Punctele sunt vectorul, începutul căruia coincide cu începutul sistemului de coordonate, iar sfârșitul este în acest moment. Vectorul razei este indicat, de regulă, scrisoarea r.. Din păcate, unii autori desemnează scrisoarea sa s.. Îți sfătuiesc cu tărie nu folosi Desemnare s. Pentru vectorul razei. Faptul este că majoritatea covârșitoare a autorilor (atât interne, cât și străine) folosesc litera S pentru a indica calea, care este scalară și vectorul razei, de regulă, nu are o relație. Dacă desemnează vectorul razei ca s.Puteți obține cu ușurință confuz. Încă o dată, noi, ca toți oamenii normali, vom folosi următoarea notație: r. - punctul de vectorială, S - calea a trecut de punct.
Vector de mișcare (de multe ori spun pur și simplu - mișcare) - aceasta este vectorA cui începe să coincide cu punctul de traiectorie unde a existat un trup când am început să studiem această mișcare, iar sfârșitul acestui vector coincide cu punctul de traiectorie în care am studiat acest studiu. Vom denota acest vector ca δ r.. Utilizarea simbolului δ este evidentă: δ r. - Aceasta este diferența dintre vectorul razei r. Punctul final al segmentului de traiectorie studiat și vectorul razei r. 0 puncte de origine a acestui segment (figura 1), adică Δ r \u003d. r. − r. 0 .

Traiectorie - Aceasta este o linie de-a lungul căreia corpul se mișcă.
Cale - Aceasta este suma lungimilor tuturor secțiunilor traiectoriei secvențial accesibile de către organism atunci când conduceți. Este indicat fie δs, dacă vine vorba de locul de traiectorie sau în cazul în care vorbim despre întreaga traiectorie a mișcării observate. Uneori (rareori) calea este indicată de o altă literă, de exemplu, L (doar nu-l indicăm ca R, am vorbit deja despre asta). Tine minte! Calea este scalar pozitivFotografiile! Calea în procesul de mișcare poate doar creșterea.
Viteza medie a mișcării v. cf.
v. cf \u003d δ. r./ Δt.
Viteza instantanee de mișcare v - Acesta este un vector definit de expresie
v. \u003d D. r./ Dt.
Calea medie de viteză V Mied este o scalară definită de expresie
V cp \u003d Δs / Δt.
Alte denumiri sunt adesea găsite, de exemplu,
Calea de viteză instantanee v este o scalară definită de expresie
Modulul vitezei de mișcare instantanee și viteza instantanee a căii este aceeași, deoarece DR \u003d DS.
Accelerația medie a.
a. cf \u003d δ. v./ Δt.
Accelerația instantanee (sau pur și simplu, accelerare) a. - Acesta este un vector definit de expresie
a. \u003d D. v./ Dt.
Accelerația tangențială (tangențială) a τ (indicele inferior este o literă grecească cu litere mici) - ea vectoracesta este vector de proiecție Accelerația instantanee pe axa tangentă.
Accelerația normală (centripetală) a n - asta. vectoracesta este vector de proiecție Accelerația instantanee pe axa normală.
Modul de accelerare a tannerului
| a. τ | \u003d DV / dt,
Adică, este un modul derivat al vitezei instantanee.
Modul de accelerație normală
| a. N | \u003d V 2 / r,
Unde R este amploarea razei curburii traiectoriei la punctul de a găsi corpul.
Important! Vreau să fiu atenți la următoarele. Nu confunda cu notația privind accelerațiile tangente și normale! Faptul este că în literatura de specialitate cu această ocazie a fost observată o foaie de leafer complet.
Tine minte!
a. τ - asta e vector accelerația tangențială
a. n - asta. vector Accelerație normală.
a. τ I. a. n sunt vector Proiecții de accelerare completă dar pe axa tangentă și axa normală, respectiv,
A τ este o proiecție (scalară!) Accelerare TANNER pe o axă tangentă,
O n este o proiecție (scalară!) Accelerare normală pe axa principală,
| a. τ | - asta modul vector accelerația tangențială
| a. N | - aceasta este modul vector Accelerație normală.
Mai ales nu este surprins dacă, citirea în literatura de specialitate cu privire la mișcarea curbilineară (în special rotirea), veți descoperi că autorul de la A τ înțelege vectorul și proiecția sa și modulul său. Același lucru se aplică unui n. Totul, așa cum spun ei, "într-o singură sticlă". Și acest lucru, din păcate, complet și aproape. Chiar și manualele pentru învățământul superior nu fac excepție, în multe dintre ele (crede-mă în cel mai mult!) Confuzie completă domnește despre acest lucru.
Deci, nu cunoașteți algebra vectorului Azov sau neglijarea acestora, este foarte ușor să vă confundați complet atunci când studiați și analizați procesele fizice. Prin urmare, cunoașterea algebrei vectoriale este cea mai reușită condiție pentru succes În studiul mecanicii. Și nu numai mecanicii. În viitor, atunci când studiați alte secțiuni de fizică, vă asigurați în mod repetat acest lucru.
Viteză unghiulară instantanee (sau pur și simplu, viteză unghiulară) ω - Acesta este un vector definit de expresie
ω \u003d D. φ / dt,
Unde D. φ - schimbarea infinit de mică a coordonatei unghiulare (D φ - vector!).
Accelerare unghiulară instantanee (sau pur și simplu, accelerația unghiulară) ε - Acesta este un vector definit de expresie
ε \u003d D. ω / Dt.
Comunicare între v., ω și r.:
v. = ω × r..
Comunicare Între V, Ω și R:
Comunicare Între | a. τ |, ε și r:
| a. τ | \u003d ε · r.
Acum mergeți la K. ecuații cinematice. tipuri specifice de mișcare. Aceste ecuații trebuie învățate pe de rost.
Ecuația cinematică a mișcării uniforme și rectilinie Are forma:
r. = r. 0 + v. T,
Unde r. - obiectul Radius-Vector la momentul T, r. 0 este același la momentul inițial t 0 (în momentul începerii observațiilor).
Ecuația cinematică a accelerației constante Are forma:
r. = r. 0 + v. 0 t +. a.t 2/2, unde v. 0 viteza obiectului în momentul t 0.
Ecuația pentru viteza corpului atunci când se deplasează cu accelerație constantă Are forma:
v. = v. 0 + a. t.
Ecuarea cinematică a mișcării uniforme în jurul circumferinței coordonatelor polare Are forma:
φ \u003d φ 0 + ω z t,
Unde φ este coordonata unghiulară a corpului la momentul timpului, φ 0 este coordonata colțului corpului în momentul începerii observării (la momentul inițial al timpului), ω z este proiecția vitezei unghiulare ω Pe axa Z (de obicei această axă este aleasă perpendiculară pe planul de rotație).
Ecuația cinematică a unui cerc de cerc cu accelerație constantă în coordonatele polare Are forma:
φ \u003d φ 0 + Ω 0Z T + ε z T 2/2.
Ecuația cinematică a oscilațiilor armonice de-a lungul axei X Are forma:
X \u003d un cos (ω t + φ 0),
În cazul în care A este amplitudinea oscilațiilor, ω este o frecvență ciclică, φ 0 - faza inițială de oscilații.
Proiecția vitezei punctului, fluctuând de-a lungul axei X, pe această axă egal cu:
V x \u003d - ω · a · păcat (ω t + φ 0).
Proiecția accelerării punctului, fluctuând de-a lungul axei X, pe această axă egal cu:
Și x \u003d - ω 2 · a · cos (ω t + φ 0).
Comunicare Între frecvența ciclică ω, frecvența obișnuită ƒ și perioada de oscilații t:
ω \u003d 2 㟟 \u003d 2 π / t (π \u003d 3.14 - numărul PI).
Pendulum matematic Are o perioadă de oscilații t, definită de expresie:
În număratorul expresiei de hrănire - lungimea filamentului pendulului, în numitor - accelerarea căderii libere
Comunicare între absolut v. ABS, rudă v. Rels și portabil v. Pe viteze:
v. abs \u003d v. Rev +. v. pe.
Aici, poate, toate definițiile și formulele care pot fi necesare la rezolvarea problemelor cinematice. Informațiile de mai sus sunt doar referințe în natură și nu pot înlocui cartea electronică, unde este disponibilă, în detaliu și sper, este fascinantă teoria acestei secțiuni a mecanicii.
Unități de bază ale valorilor de măsurare în sistemul SI Astfel de:
- o unitate de lungime (1 m),
- timp - al doilea (1 s),
- mase - kilogram (1 kg),
- cantitatea de substanță este mol (1 mol),
- temperaturi - Kelvin (1 K),
- forțe de curent electric - amp (1 a),
- Referință: Forțele luminoase - Candela (1 CD, nu este de fapt folosită în rezolvarea sarcinilor școlare).
La calcularea calculelor din sistem, unghiurile sunt măsurate în radiani.
Dacă sarcina din fizică nu este specificată, în care trebuie să se răspundă unitățile, trebuie să fie acordată în unități de sistem SI sau în derivați din acestea, valorile corespunzătoare mărimii fizice ale căror sarcină este solicitată în sarcină. De exemplu, dacă sarcina trebuie să găsească viteza și nu spune ceea ce trebuie exprimat, răspunsul trebuie administrat în m / s.
Pentru comoditate, sarcinile din fizică adesea trebuie să utilizeze de dolari (reducere) și mai multe console (în creștere). Ele pot fi aplicate la orice dimensiune fizică. De exemplu, mm este un milimetru, CT-Kilotonne, NS-nanosecond, Mg - Megagrams, mmol - milimol, MCA - microamper. Amintiți-vă că nu există console duble în fizică. De exemplu, ICG este un micrograme și nu millikilograme. Rețineți că la adăugarea și scăderea valorilor, puteți utiliza numai valorile aceleiași dimensiuni. De exemplu, kilogramele pot fi îndoite numai cu kilograme, puteți deduce doar milimetri de la milimetri și așa mai departe. La transferarea valorilor, utilizați tabelul următor.
Cale și mișcare
Cinematică Ei numesc secția de mecanică în care este luată în considerare mișcarea organismelor fără a clarifica motivele acestei mișcări.
Mișcarea mecanică Corpurile numesc schimbarea poziției sale în spațiu în raport cu alte corpuri în timp.
Fiecare corp a definit dimensiuni. Cu toate acestea, în multe sarcini mecanică, nu este nevoie să se indice pozițiile părților individuale ale corpului. Dacă dimensiunile corpului sunt mici în comparație cu distanțele cu alte corpuri, atunci acest corp poate fi luat în considerare punct de material. Deci, atunci când mutați o mașină pe distanțe lungi, puteți să o neglijați lung, deoarece lungimea mașinii este mică în comparație cu distanțele pe care le trece.
Este intuitivă că caracteristicile mișcării (viteza, traiectoria etc.) depind de locul în care ne uităm la el. Prin urmare, conceptul de sistem de referință este introdus pentru a descrie mișcarea. Sistemul de referință (CO) - o combinație a corpului de referință (este considerată absolut solidă), legată de acesta de către sistemul de coordonate, conducătorul (măsurarea dispozitivului), orele și sincronizatorul de timp.
Trecerea în timp de la un punct la altul, corpul (punctul material) descrie într-o anumită linie numită traiectoria mișcării corpului.
Deplasarea corpului Acestea numesc linia de tăiere direcțională care leagă poziția inițială a corpului cu poziția finală. Mutați există o magnitudine vectorială. Mutarea poate crește în procesul de mișcare, scade și devine zero.
A trecut cale egală cu lungimea traiectoriei a trecut de organism pentru o vreme. Calea este o valoare scalară. Calea nu poate fi redusă. Calea crește doar rămâne constantă (dacă organismul nu se mișcă). Când organismul se deplasează de-a lungul traiectoriei curbilineare, modulul (lungimea) vectorului de mișcare este întotdeauna mai mic decât calea parcursă.
Pentru uniformă (la viteză constantă) L. Pot fi găsite prin formula:
unde: v. - viteza corpului, t. - Timpul pentru care sa mutat. La rezolvarea sarcinilor cinematice, mișcarea este de obicei făcută din considerente geometrice. Adesea, considerațiile geometrice pentru localizarea mișcării necesită cunoașterea teoremei Pythagores.
viteza medie
Viteză - Cantitatea vectorului care caracterizează viteza de deplasare a corpului în spațiu. Viteza este medie și instantanee. Viteza instantanee descrie mișcarea din acest punct particular din acest punct de spațiu, iar viteza medie caracterizează toată mișcarea ca un întreg, în general, fără a descrie detaliile mișcării la fiecare anumit loc.
Calea medie de viteză - acesta este raportul dintre tot drumul spre tot timpul de mișcare:

unde: L. plin - tot felul în care a trecut corpul, t. Full - tot timpul mișcării.
Viteza medie a mișcării - Acesta este raportul dintre toate mișcările la tot timpul de mișcare:

Această valoare este îndreptată, precum și mișcarea completă a corpului (adică din punctul de plecare al mișcării până la punctul final). În același timp, nu uitați că mișcarea completă nu este întotdeauna egală cu cantitatea algebrică de mișcări în anumite etape ale mișcării. Vectorul de mișcare completă este egal cu suma vectorială a mișcărilor la etapele separate ale mișcării.
- La rezolvarea problemelor legate de cinematică, nu faceți o eroare foarte frecventă. Viteza medie nu este de obicei egală cu viteza medie a corpului aritmetică în fiecare etapă a mișcării. Media aritmetică este obținută numai în anumite cazuri.
- Și chiar mai mult, viteza medie nu este egală cu una dintre vitele pe care corpul le mișcă în timpul mișcării, chiar dacă această viteză a avut o valoare intermediară față de celelalte viteze cu care se mișca corpul.
Mișcarea directă egală
Accelerare - Cantitatea fizică vectorială care determină viteza de schimbare a corpului corpului. Accelerarea organismului se numește raportul dintre schimbările de viteză până în perioada în care a avut loc schimbarea vitezei:
![]()
unde: v. 0 - Viteza inițială a corpului, v. - viteza finală a corpului (adică după o perioadă de timp t.).
În plus, dacă nu se indică altfel în starea problemei, credem că dacă corpul se mișcă cu accelerare, această accelerare rămâne constantă. O astfel de mișcare a corpului este numită egal (sau egal). Cu o mișcare de echilibru, viteza corpului variază la aceeași valoare pentru orice perioadă egală de timp.
Mișcarea egală întrebată este de fapt accelerată atunci când corpul crește viteza și încetinește când viteza scade. Pentru simplitate, sarcinile sunt convenabile pentru o mișcare lentă de a lua accelerația cu semnul "-".
Din formula anterioară, trebuie descrisă o altă formulă comună mai comună schimbarea vitezei cu timpul Cu o mișcare de echilibru:
Mutați (dar nu calea) La o mișcare egalizată, formulele sunt calculate prin formule:

![]()
În ultima formulă, a fost utilizată o singură caracteristică a unei mișcări echivalente. Cu o mișcare de echilibru, viteza medie poate fi calculată ca medie aritmetică și viteza finală (această proprietate este foarte convenabilă de utilizat la rezolvarea unor sarcini):
Odată cu calcularea căii, totul este mai complicat. Dacă corpul nu a schimbat direcția de mișcare, atunci cu o mișcare echilibrată dreaptă, calea este numerică egală cu mișcarea. Și dacă sa schimbat - este necesar să citiți separat calea înainte de oprirea (transformarea momentului) și calea după oprire (momentul inversării). Și doar o rezistență la timp în formula pentru deplasarea în acest caz va duce la o eroare tipică.
Coordona La o mișcare de echilibru, schimbări în temeiul legii:

Viteza de proiecție Cu o mișcare de echilibru, se schimbă în conformitate cu o astfel de lege:
![]()
Sunt obținute formule similare pentru axele de coordonate rămase.
Drop liber de verticală
Pe toate corpurile din câmpul de pământ, puterea actelor de gravitate. În absența suportului sau suspensiei, această putere determină ca corpurile să cadă pe suprafața pământului. Dacă neglija rezistența la aer, atunci mișcarea corpului numai sub acțiunea gravitației se numește o scădere liberă. Forța raportului de gravitație către orice organisme, indiferent de forma, masa și dimensiunile, aceeași accelerație, numită accelerarea căderii libere. Lângă suprafața pământului accelerarea gravității Cantitate:
Aceasta înseamnă că scăderea liberă a tuturor corpurilor din apropierea suprafeței Pământului este o mișcare echivalentă (dar nu neapărat simplă). În primul rând, luați în considerare cel mai simplu caz de cădere liberă atunci când organismul se mișcă strict vertical. O astfel de mișcare este o mișcare simplă de echilibru, astfel încât toate modelele studiate anterior și focul dintr-o astfel de mișcare sunt potrivite pentru căderea liberă. Numai accelerația este întotdeauna egală cu accelerarea căderii libere.
În mod tradițional, cu o cădere liberă, se folosește axa verticală direcționată a OY. Nu este nimic teribil aici. Au nevoie doar de toate formulele în loc de index " h."Scrie" w." Se păstrează semnificația acestui indice și a regulii de definiție a semnelor. Unde să direcționați axa Oy - alegerea dvs. în funcție de confortul de rezolvare a problemei. Opțiuni 2: în sus sau în jos.
Să dăm câteva formule care rezolvă anumite sarcini cinematice specifice pentru scăderea liberă a verticală. De exemplu, viteza cu care corpul care se încadrează de la înălțime cade h. Fără viteză inițială:
Timpul de toamnă de la înălțime h. Fără viteză inițială:

Înălțimea maximă a căreia corpul va crește, abandonat vertical la viteza inițială v. 0, timpul de ridicare a acestui corp pentru o înălțime maximă și timpul complet de zbor (înainte de a reveni la punctul de plecare):
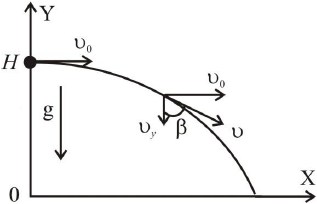
Aruncă orizontală
Cu o aruncare orizontală la viteza inițială v. 0 Mișcarea corpului este convenabil considerată ca două mișcări: uniformă de-a lungul axei Oh (de-a lungul axei Oh nu există nici o forță de a împiedica sau de a ajuta mișcarea) și mișcarea de echilibru de-a lungul axei Oy.
Viteza în orice moment este direcționată de traiectorie. Poate fi descompus în două componente: orizontală și verticală. Componenta orizontală rămâne întotdeauna neschimbată și egală v. x \u003d. v. 0. Și creșterea verticală în conformitate cu legile mișcării accelerate v. y \u003d. gT.. În care viteza corpului complet Pot fi găsite prin formule:
![]()
![]()
Este important să înțelegeți că timpul caderii corpului nu depinde de viteza orizontală a fost aruncată, dar este determinată numai de înălțimea cu care era aruncată corpul. Timpul de a cădea corpul la sol este prin formula:

În timp ce corpul scade, se mișcă simultan de-a lungul axei orizontale. Prin urmare, gama de zboruri a corpului sau distanța pe care corpul o poate zbura de-a lungul axei OH, va fi egală cu:
Colțul fiecăruia orizont. și viteza corpului este ușor de găsit din raport:

Uneori, uneori, în sarcini pot întreba despre momentul în care viteza totală a corpului va fi înclinată la un anumit unghi vertical. Apoi, acest unghi va fi din raport:

Este important să înțelegeți care unghi apare în sarcină (cu un vertical sau orizontal). Acest lucru vă va ajuta să alegeți formula potrivită. Dacă rezolvați această problemă cu metoda de coordonate, apoi formula generală pentru legea modificărilor coordonatelor cu o mișcare de echilibru:
![]()
Acesta este convertit în următoarea lege a mișcării de-a lungul axei OY pentru corpul unui orizontal abandonat:
Cu ajutorul ei, putem găsi înălțimea pe care corpul va fi localizat în orice moment. În același timp, în momentul corpului se încadrează la coordonarea pământului a corpului de-a lungul axei Oy va fi zero. Evident, de-a lungul axei Oh, organismul se mișcă uniform, prin urmare, în cadrul metodei de coordonate, coordonata orizontală se va schimba prin lege:
Arunca la un unghi la orizont (de la sol pe pământ)
Înălțimea maximă de ridicare atunci când aruncați într-un unghi la orizont (în raport cu nivelul inițial):

Timp de ridicare la înălțimea maximă la aruncarea la un unghi la orizont:

Gama de zboruri și cu normă întreagă a corpului corpului abandonată într-un unghi la orizont (cu condiția ca zborul să se încheie la aceeași înălțime cu care corpul a fost aruncat, de exemplu, de la pământ pe pământ):

Rata minimă a corpului organismului abandonată la un unghi la orizont este în cel mai înalt punct al ridicării și este egal cu:
Rata maximă a corpului abandonată la un unghi la orizont este la momentele de aruncare și cădere la pământ și este egală cu cea inițială. Această afirmație este adevărată doar pentru aruncarea de pe Pământ pe Pământ. Dacă corpul continuă să zboare sub nivelul din care a fost aruncat, va fi acolo pentru a obține o creștere și mai mare viteză.
Adăugarea vitezei
Mișcarea Tel poate fi descrisă în diferite sisteme de referință. Din punct de vedere al cinematicii, toate sistemele de referință sunt egale. Cu toate acestea, caracteristicile cinematice ale mișcării, cum ar fi traiectoria, mișcarea, viteza, sunt diferite în diferite sisteme. Valorile în funcție de alegerea sistemului de referință în care se face măsurătorul lor se numește relativă. Astfel, pacea și mișcarea corpului sunt relative.
Astfel, rata absolută a corpului este egală cu suma vectorială a vitezei sale față de sistemul de coordonate mobile și viteza sistemului de referință mobil în sine. Sau, cu alte cuvinte, viteza corpului în sistemul de referință fixă \u200b\u200beste egală cu cantitatea vectorială a vitezei corpului în sistemul de referință mobil și viteza sistemului de referință mobil relativ fix.
Mișcare uniformă în jurul cercului
Mișcarea corpului în jurul circumferinței este un caz special de mișcare curbilinară. Acest tip de mișcare este, de asemenea, luat în considerare în cinematică. Cu mișcare curbată, vectorul de viteză corporală este întotdeauna îndreptat spre tangent la traiectorie. Același lucru se întâmplă atunci când conduceți în jurul cercului (a se vedea figura). Mișcarea uniformă a corpului din jurul cercului este caracterizată de o serie de valori.

Perioadă - Timpul pentru care corpul, care se mișcă în jurul cercului, face o întoarcere completă. Unitate de măsurare - 1 s. Perioada este calculată prin formula:
Frecvență - Numărul de revoluții care au făcut corpul prin deplasarea în jurul circumferinței, pe unitate de timp. Unitate de măsurare - 1 Rev / s sau 1 Hz. Frecvența se calculează cu formula:
În ambele formule: N. - numărul de revoluții în timpul perioadei t.. Așa cum se poate observa din formulele de mai sus, perioada și frecvența amplorii interpretării:
![]()
Pentru viteza uniformă de rotație Corpurile vor fi definite după cum urmează:
![]()
unde: l. - lungimea cercului sau a căii trecute de organism în timpul unei perioade egale T.. Când corpul se mișcă în jurul cercului, este convenabil să se ia în considerare mișcarea unghiulară φ (sau unghiul de rotație), măsurată în radiani. Viteza unghiulară ω Corpurile din acest moment sunt numite raportul dintre o mișcare unghiulară mică δ φ la o perioadă mică de timp δ t.. Evident, în timpul unei perioade egale T. Corpul va trece un unghi egal cu 2 π Prin urmare, cu o mișcare uniformă în jurul cercului, formulele sunt efectuate:
![]()
Viteza unghiulară este măsurată în rad / s. Nu uitați să transferați colțuri de la grade la radiani. Durata Dougie. l. asociate cu un unghi de rotație prin raport:
Comunicarea dintre modulul de viteză liniară v. și viteza unghiulară ω :
![]()
Atunci când corpul se mișcă în jurul cercului cu un modul constant, numai direcția vectorului de viteză se schimbă, astfel încât mișcarea corpului în jurul circumferinței cu o viteză constantă cu viteza este mișcarea cu accelerație (dar nu egală cu), Deoarece direcția schimbării vitezei. În acest caz, accelerația este îndreptată de-a lungul razei în centrul cercului. Se numește normal, sau accelerație centripetăDeoarece vectorul de accelerare în orice punct al cercului este îndreptat spre centrul său (a se vedea figura).

Modul de accelerație centripetală Linia este asociată v pe acest site. Pentru aceasta aveți nevoie de ceva, și anume, să dedicați pregătirile pentru CT în fizică și matematică, studiul teoriei și rezolvarea problemelor de trei sau patru ore în fiecare zi. Faptul este că CT este un examen, unde nu este suficient să cunoaștem fizica sau matematica, trebuie să fiți capabili să rezolvați rapid și fără eșecuri pentru a rezolva un număr mare de sarcini pe diferite subiecte și complexitate variabilă. Puteți învăța doar cum să rezolvați mii de sarcini.
Implementarea cu succes, diligentă și responsabilă a acestor trei articole, precum și studiul responsabil al testelor finale de formare, vă va permite să arătați un rezultat excelent la CT, maximul a ceea ce sunteți capabili.
A găsit o greșeală?
Dacă credeți că veți avea o greșeală în materialele de instruire, vă rugăm să scrieți despre el prin e-mail (). În scrisoare, specificați subiectul (fizica sau matematica), numele sau numărul subiectului sau testului, numărul de sarcină sau un loc în text (pagina) unde credeți că există o eroare. Descrieți, de asemenea, ce este eroarea estimată. Scrisoarea dvs. nu va rămâne neobservată, eroarea va fi fixată, fie veți explica de ce aceasta nu este o greșeală.