იმისათვის, რომ გავიგოთ, თუ რა მექანიკური კვლევები, აუცილებელია განიხილოს რა მოძრაობა ნიშნავს ყველაზე ზოგად გრძნობას. ამ სიტყვის ღირებულება გულისხმობს რაღაც ცვლილებას. მაგალითად, პოლიტიკური მოძრაობა ხელს უწყობს მოსახლეობის სხვადასხვა ფენების თანასწორობას, მიუხედავად მათი რასობრივი კუთვნილების მიუხედავად. ადრე, ეს არ იყო, მაშინ რაღაც შეიცვალა და ახლა ყველა ადამიანს აქვს თანაბარი უფლებები. ეს არის ცივილიზაციის მოძრაობა. კიდევ ერთი მაგალითია გარემო. წარსულში, არჩევის ბუნებაში, არავინ ფიქრობდა იმაზე, თუ რა ტოვებს ნაგვის შემდეგ. დღეს, ნებისმიერი ცივილიზებული ადამიანი მასთან შეაგროვებს მასთან ერთად და იღებს სპეციალურად დანიშნულ ადგილას შემდგომი განკარგვისთვის.
მსგავსი რამ შეიძლება შეინიშნოს მექანიკაში. მექანიკური მოძრაობით, სხეულის პოზიციაზე ცვლილებების შეტანა სივრცეში სხვა ელემენტებთან შედარებით. მექანიკის მთავარი ამოცანაა მიუთითოს, სადაც ობიექტი ნებისმიერ დროს, განიხილავს, რაც ჯერ კიდევ არ არის. ანუ, სხეულის პოზიციის პროგნოზირება განსაზღვრულ დროს და არა მხოლოდ იმის გასარკვევად, სადაც წარსულში იყო.
კინემატიკა არის მექანიკის სექცია, რომელიც სწავლობს სხეულის გადაადგილებას მისი მიზეზების გაანალიზების გარეშე. ეს იმას ნიშნავს, რომ ის ასწავლის, რომ არ ახსნას, მაგრამ აღწერს. ეს არის, ამუშავება ისე, რომლითაც შესაძლებელი იქნებოდა სხეულის პოზიციის დასადგენად ნებისმიერ დროს. Kinematics- ის ძირითადი კონცეფციები მოიცავს სიჩქარეს, აჩქარებას, მანძილს, დროსა და მოძრაობას.
სირთულე მოძრაობის აღწერაში
პირველი პრობლემა, რომელთანაც Kinematics სახეები არის ის, რომ თითოეული სხეულის აქვს გარკვეული ზომა. დავუშვათ, რომ საჭიროა გარკვეული ობიექტის გადაადგილების აღწერა. ეს იმას ნიშნავს, თუ როგორ უნდა დანიშნოს მისი პოზიცია ნებისმიერ დროს. მაგრამ თითოეული ნივთი გარკვეული ადგილია სივრცეში. ანუ, რომ ამ ობიექტის ყველა ნაწილი იმავე პუნქტში დროთა განმავლობაში სხვადასხვა პოზიციას იკავებს.

რა წერტილი ამ შემთხვევაში უნდა აღინიშნოს მთელი სუბიექტის ადგილმდებარეობის აღსაწერად? თუ თითოეული მათგანი განიხილავთ, მაშინ გაანგარიშებები ძალიან რთული იქნება. ამიტომ, ამ კითხვაზე პასუხის გაცემის გადაწყვეტილება ადვილად გამარტივდება. თუ ერთი სხეულის ყველა ნაწილი იმავე მიმართულებით გადაადგილდება, საკმარისია, რომ ეს სხეული შეიცავს.
ტიპების მოძრაობა Kinematics
არსებობს სამი ტიპი:
- არსებობს პროგრესული მოძრაობა, რომელშიც სხეულში დახარჯული პირდაპირი დარჩა პარალელურად. მაგალითად, ავტომანქანა, რომელიც მოძრაობს გზატკეცილზე, ასეთ ტიპზე მოძრაობს.
- როტაციამ უწოდა ასეთი სხეულის ასეთი მოძრაობა, რომელშიც ყველა მისი ქულა გადაადგილდება წრეების გარშემო, ცენტრებში ერთ სწორ ხაზზე, მოუწოდა როტაციის ღერძი. მაგალითად, დედამიწის როტაცია მის ღერძთან შედარებით.
- Oscillatory არის მოძრაობა, რომელშიც სხეული იმეორებს თავის ტრაექტორია გარკვეული დროის განმავლობაში. მაგალითად, pendulum- ის მოძრაობა.
კინემატიკის ძირითადი კონცეფციები - მატერიალური პუნქტი
ნებისმიერი კომპლექსური მოძრაობა შეიძლება აღწერილი იყოს როგორც ორი მარტივი სახეობის კომბინაცია - პროგრესული და ბრუნვის კომბინაცია. მაგალითად, ავტომობილის საჭე ან იულა, პირდაპირ მოძრაობს პირდაპირ, ამ ორ ტიპის მოძრაობაში ერთდროულად.

მაგრამ რა მოხდება, თუ სხეულის გადაადგილება არ შეიძლება წარმოდგენილი იყოს კომბინაციაში? მაგალითად, თუ მანქანა ჩავა bumpy გზა, მისი პოზიცია შეიცვლება ძალიან რთულია. თუ მხოლოდ გამოვთვალოთ ის ფაქტი, რომ ეს ტრანსპორტი ერთ ქალაქადან მეორეზე გადადის, მაშინ ასეთ სიტუაციაში არ აქვს მნიშვნელობა, თუ რა ზომის სხეული მიდის წერტილი A- მდე წერტილი B და ისინი შეიძლება უგულვებელყოფილია. ამ შემთხვევაში, მნიშვნელოვანია მხოლოდ იმ დროისთვის, თუ რა დრო გავიდა გარკვეული მანძილი და რა სიჩქარე გადავიდა.
თუმცა, უნდა გაითვალისწინოს, რომ ზომის უგულებელყოფა თითოეულ ამოცანას არ აძლევს. მაგალითად, თუ მანქანის ავტოსადგომზე მოძრაობის გამოთვლა, მაშინ ამ სხეულის მასშტაბის იგნორირება გამოიწვევს საზიანო შედეგს. აქედან გამომდინარე, მხოლოდ იმ სიტუაციებში, სადაც კონკრეტული ამოცანაა, მოძრავი ობიექტის ზომები შეიძლება უგულვებელყოფილია, მაშინ ასეთი სხეული მასალას ეწოდება.
ფორმულები Kinematics
ციფრები, რომლის მიხედვითაც სივრცეში მითითებული ადგილია კოორდინატები. რათა დადგინდეს სწორი ხაზი, მხოლოდ ერთი რიცხვი, როდესაც საქმე ზედაპირზე, მაშინ ორი, შესახებ სივრცე - სამი. სამგანზომილებიანი სამყაროში მეტი რიცხვი (მატერიალური პუნქტის პოზიციის აღსაწერად) არ არის საჭირო.

კინემატიკის კონცეფციისთვის სამი ძირითადი განტოლებაა, როგორც ტელ-ტელ-გადაადგილების განყოფილებაში:
- v \u003d u + ზე.
- S \u003d ut + 1 / 2at 2.
- v 2 \u003d u 2 + 2as.
v \u003d Ultimate სიჩქარე,
u \u003d თავდაპირველი სიჩქარე
a \u003d აჩქარება
s \u003d მანძილი სხეულის მიერ
Kinematics ფორმულები ერთ განზომილებიანი სივრცეში:
X - x o \u003d v o t + 1/2A t2
V 2 \u003d v o 1 + 2a (x - x o)
X - x o \u003d 1 \\ 2 (v o + v) t
სადაც,
V - საბოლოო სიჩქარე (M / S),
V O - საწყისი სიჩქარე (M / S),
a - აჩქარება (M / S 2),
t - დრო (ებ) ი,
X - საბოლოო პოზიცია (მ),
Kinematics ფორმულები ორ განზომილებიანი სივრცეში
ვინაიდან შემდეგი განტოლებები გამოიყენება თვითმფრინავის მატერიალური პუნქტის აღსაწერად, ეს არის X და Y ღერძის გათვალისწინება.
მიმართულებით X:
x \u003d. მუდმივი.
V fx \u003d v i x + a x δt
X f \u003d x i + v i x δt + 1 / 2a x δt 2
Δt \u003d V FX -V IX / a x
V fx 2 \u003d v ix 2 + 2ax δx
X f \u003d x i + 1/2 (v fx + v ix) δ t.
და Y:
y \u003d. მუდმივი.
V fy \u003d v iy + a y δt
y f \u003d y i + v δt + 1/2 a x δt 2
Δt \u003d v fy - v iy / a y
V fy 2 \u003d v iy 2 + 2 ay δ y
y f \u003d y i +1/2 (v fy + v iy) δt.
V F - საბოლოო სიჩქარე (M / S),
V I - საწყისი სიჩქარე (M / S),
a - აჩქარება (მ / გ 2),
t - დრო (ებ) ი,
X - საბოლოო პოზიცია (მ),
X 0 - თავდაპირველი პოზიცია (მ).
მიტოვებული ექსპლუატაციის გადატანა საუკეთესო მაგალითია ორი განზომილების ობიექტის გადაადგილებისთვის. აქ სხეული მოძრაობს, როგორც Y- ის ვერტიკალურ მდგომარეობაში, ხოლო ჰორიზონტალურ მდგომარეობაში x, ამიტომ შეგვიძლია ვთქვათ, რომ ობიექტს აქვს ორი სიჩქარე.
კინემატიკის ამოცანების მაგალითები
ამოცანა 1.: თავდაპირველი სატვირთო სიჩქარე არის ნულოვანი. თავდაპირველად, ეს ობიექტი არის დანარჩენი. იგი იწყება 5.21 წამის ინტერვალის დროს ერთგვაროვანი აჩქარების მიზნით. სატვირთო მანქანების მანძილი 110 მ. იპოვეთ აჩქარება.
გადაწყვეტილება:
მანძილი s \u003d 110 მ გავიდა
საწყისი სიჩქარე v i \u003d 0,
დრო T \u003d 5.21 S,
აჩქარება \u003d?
კინემატოკაციების ძირითადი კონცეფციისა და ფორმულის გამოყენებით, შეიძლება დაასკვნა, რომ
s \u003d v i t + 1/2 a t 2,
110 მ \u003d (0) × (5.21) + 1/2 × A (5.21) 2,
a \u003d 8.10 მ / S 2.
ამოცანა 2: წერტილი x ღერძის გასწვრივ (სმ), მგზავრობის T წამის შემდეგ, შეიძლება წარმოდგენილი იყოს განტოლების X \u003d 14T 2 - T + 10. აუცილებელია იპოვოთ პუნქტის საშუალო წერტილი, იმ პირობით, რომ T \u003d 3s?
გადაწყვეტილება:
T \u003d 0-ის პოზიციის პოზიცია X \u003d 10 სმ.
T \u003d 3s, x \u003d 133 სმ.
საშუალო სიჩქარე, V AV \u003d δx / δt \u003d 133-10 / 3-0 \u003d 41 სმ / ს.
რა არის წერტილი მითითება
მოძრაობაში შეიძლება მხოლოდ თქვეს, თუ არსებობს რაღაც, რომელთანაც შესწავლილი ობიექტის პოზიციაზე ცვლილება ითვლება. ასეთი ობიექტი ეწოდება საცნობარო ორგანოს და ის ყოველთვის ფიქრობს ფიქსირებული ერთი.
თუ ამოცანა არ არის მითითებული, რომელი ანგარიშის სისტემა მატერიალურ წერტილს მოძრაობს, ნაგულისხმევი მიწა ითვლება ნაგულისხმევი ორგანო. თუმცა, ეს არ ნიშნავს იმას, რომ დროთა განმავლობაში ფიქსირებული დროის განმავლობაში, ობიექტის ნათესავი ობიექტი, რომელსაც მოძრაობა ხორციელდება, გაანგარიშების ნებისმიერი სხვა მოსახერხებელი არ შეიძლება. მაგალითად, მინიშნება ორგანოსთვის, შეგიძლიათ მიიღოთ მოძრავი მატარებელი, მბრუნავი მანქანა და ასე შემდეგ.
მინიშნება სისტემა და მისი ღირებულება კინემატიკაში
შუამდგომლობის აღსაწერად, საჭიროა სამი კომპონენტი:
- კოორდინირებული სისტემა.
- მითითება.
- მოწყობილობის საზომი დრო.

მინიშნება ორგანო, მასთან ასოცირებული კოორდინაციის სისტემა და გაზომვის დროის აპარატურა. ეს უაზროა, რომ ვისაუბროთ მოძრაობის შესახებ, თუ ის არ აკონკრეტებს მას. სწორად შერჩეული საცნობარო სისტემა საშუალებას გაძლევთ გააფორმოთ გადაადგილების აღწერა და პირიქით, გაართულებს, თუ იგი არჩეულია.
სწორედ ამ მიზეზით, კაცობრიობა მიიჩნევდა, რომ მზე დედამიწის გარშემო მოძრაობდა და ეს იყო სამყაროს ცენტრში. ასეთი კომპლექსური მოძრაობა, რომელიც დაკავშირებულია იმ ფაქტს, რომ მიწიერი დამკვირვებლები არიან საცნობარო სისტემაში, რაც ძალიან შეუთავსებელია. დედამიწა ბრუნავს თავის ღერძს და მზეზე ამავე დროს. სინამდვილეში, თუ შეცვალეთ მითითების სისტემა, მაშინ ციური სხეულების ყველა მოძრაობა ადვილად აღწერილია. ეს ერთ დროს გაკეთდა კოპერნიკუსი. მან შესთავაზა მსოფლიო წესრიგის საკუთარი აღწერა, რომელშიც მზე უმოძრაო. რაც შეეხება, აღწერეთ პლანეტების მოძრაობა ბევრად უფრო ადვილია, ვიდრე სხეული დედამიწაა.

კინემატიკის ძირითადი კონცეფციები - გზა და ტრაექტორია
მოდით გარკვეული წერტილი პირველი იყო, როდესაც გარკვეული დროის შემდეგ აღმოჩნდა პოზიცია V. მათ შორის თქვენ შეგიძლიათ გაატაროთ ერთი ხაზი. ასე რომ, ეს პირდაპირი გადატანა უფრო მეტ ინფორმაციას გადაადგილების შესახებ, ანუ, ეს იყო ნათელი, საიდანაც და სადაც სხეული გადავიდა, ეს არ უნდა იყოს მხოლოდ სეგმენტი, მაგრამ როგორც წესი,, როგორც წესი, მითითებულია წერილი S. სხეულის მოძრაობა, არის მოუწოდა ვექტორს, რომელიც ჩატარდა სუბიექტის თავდაპირველი პოზიციისგან.

თუ სხეული თავდაპირველად იყო, და შემდეგ აღმოჩნდა, რომ ბ, ეს არ ნიშნავს იმას, რომ ეს მხოლოდ სწორი ხაზით გადავიდა. ერთი პოზიციიდან მეორეზე, შეგიძლიათ მიიღოთ უსასრულო გზების რაოდენობა. ხაზის გასწვრივ, რომელიც სხეულის მოძრაობს, კინემატიკის კიდევ ერთი ძირითადი კონცეფციაა - ტრაექტორია. და მისი სიგრძე ეწოდება გზას, რომელიც, როგორც წესი, აღინიშნება ასოებით L ან L.
სხდომა უახლოვდება და დროა ჩვენთვის თეორიის პრაქტიკაში გადაადგილება. შაბათ-კვირას ვიჯექი და ვფიქრობდი, რომ ბევრმა სტუდენტმა უნდა ჰქონდეს კარგი ფიზიკური ფორმულა ხელი. მშრალი ფორმულები ახსნა-განმარტებით: მოკლედ, მოკლედ, არაფერია ზედმეტი. ძალიან სასარგებლო რამ, როდესაც გადაჭრის ამოცანები, თქვენ იცით. დიახ, და გამოცდაზე, როდესაც მას შეუძლია "გადმოიყვანოს" ხელმძღვანელი, ზუსტად ის, სანამ ის იყო crawled, ასეთი შერჩევა ემსახურება საუკეთესო მომსახურებას.
ყველაზე ამოცანები, როგორც წესი, სთხოვენ ფიზიკის სამი ყველაზე პოპულარული სექციებს. ის მექანიკა, თერმოდინამიკა და მოლეკულური ფიზიკა, ელექტროობა. და მათ!
ფიზიკის დინამიკის ძირითადი ფორმულები, კინემატიკა, სტატიკური
დავიწყოთ მარტივი. ძველი კარგი საყვარელი სწორი და ერთიანი მოძრაობა.
კინემატიკის ფორმულები:
რა თქმა უნდა, ჩვენ არ დავივიწყებთ წრეში გადაადგილების შესახებ, შემდეგ კი დინამიკა და ნიუტონის კანონები.

დინამიკის შემდეგ, დროა განიხილოს ორგანოებისა და სითხეების წონასწორობის პირობები, ანუ. სტატიკები და ჰიდროტექნიკა

ახლა წარმოგიდგენთ ძირითად ფორმებს თემაზე "სამუშაო და ენერგია". სად ვართ მათ გარეშე!

მოლეკულური ფიზიკისა და თერმოდინამიკის ძირითადი ფორმულები
ჩვენ დავასრულებთ მექანიკის განყოფილებას ფორმულები რყევებისა და ტალღების შესახებ და მოლეკულური ფიზიკისა და თერმოდინამიკისკენ გადაადგილება.

სასარგებლოა კოეფიციენტი, Gay-Loursak- ის კანონი, KlaPaireron-Mendeleev განტოლება - ყველა ამ cute heart ფორმულა აგროვებს ქვემოთ.
Ჰო მართლა! ყველა ჩვენი მკითხველი ახლა არის ფასდაკლება 10% ზე ნებისმიერი სახის სამუშაო.

ფიზიკის ძირითადი ფორმულები: ელექტროენერგია
დროა გადავიდეს ელექტროენერგია, მიუხედავად იმისა, რომ უყვარს ნაკლებად თერმოდინამიკა. ჩვენ ვიწყებთ ელექტროსტატიკას.


და, ბარაბნის ფრაქციის ქვეშ, OMA- ს, ელექტრომაგნიტური ინდუქციური და ელექტრომაგნიტური oscillations- ის ფორმულების დასრულება.

Სულ ეს არის. რა თქმა უნდა, შესაძლებელი იქნებოდა მთელ მთის ფორმულას, მაგრამ ეს არაფერია. როდესაც ფორმულები ძალიან ბევრია, ადვილად შეიძლება დაბნეული, და იქ მათ შეუძლიათ ტვინის დნება. ვიმედოვნებთ, რომ ჩვენი მოტყუების ფურცლის ძირითადი ფორმულები ფიზიკაში ხელს შეუწყობს საყვარელ ამოცანებს სწრაფად და უფრო ეფექტურობას. და თუ გსურთ რაღაცის გასარკვევად ან არ აღმოაჩინეს საჭირო ფორმულა: სთხოვეთ ექსპერტებს სტუდენტური სამსახური. ჩვენი ავტორები ასობით ფორმულები არიან ხელმძღვანელი და დაწკაპეთ ამოცანები, როგორიცაა თხილი. კონტაქტი, და მალე ნებისმიერი ამოცანა იქნება თქვენ "კბილზე".
უპირველეს ყოვლისა, უნდა აღინიშნოს, რომ ეს იქნება გეომეტრიული წერტილი, რომელიც არის სივრცის ფართობი, რომელსაც არ გააჩნია ზომები. ეს არის ამ აბსტრაქტული გამოსახულება (მოდელი) და ქვემოთ წარმოდგენილი ყველა განსაზღვრება და ფორმულები. თუმცა, brevity მე გავაგრძელებთ ვისაუბროთ მოძრაობის შესახებ სხეული, წინააღმდეგ ყოფნა ან ნაწილაკები. ეს არის ის, რაც მე მხოლოდ მე უფრო ადვილია, რომ წაიკითხოთ. მაგრამ ყოველთვის გვახსოვს, რომ გეომეტრიულ წერტილზე ვსაუბრობთ.
რადიუსის ვექტორი ქულები არის ვექტორი, რომლის დასაწყისი ემთხვევა კოორდინატთა სისტემის დასაწყისას და ბოლოს არის ამ ეტაპზე. რადიუსის ვექტორი მითითებულია, როგორც წესი, წერილი რ.. სამწუხაროდ, ზოგიერთი ავტორის მიერ მისი წერილი ს.. მე მტკიცედ ვურჩევ არ გამოიყენოთ Დანიშნულება ს. რადიუსის ვექტორზე. ფაქტია, რომ ავტორთა აბსოლუტური უმრავლესობა (როგორც შიდა და უცხო) გამოიყენებს წერილს, რათა მიუთითოს გზა, რომელიც არის სკალარი და რადიუს-ვექტორი, როგორც წესი, არ აქვს ურთიერთობა. თუ თქვენ აღინიშნებთ რადიუსის ვექტორს ს.მარტივად შეგიძლიათ დაბნეული. კიდევ ერთხელ, ჩვენ, ისევე როგორც ყველა ნორმალური ადამიანი, გამოიყენებს შემდეგ ცნობას: რ. - RADIUS-VECTOR POINT, S - გზა გავიდა წერტილი.
მოძრაობის ვექტორი (ხშირად ამბობენ, შესახლება) - ეს არის ვექტორივისი დასაწყისია ემთხვევა ტრაექტორია, სადაც იყო სხეული, როდესაც ამ მოძრაობის შესწავლა დავიწყეთ და ამ ვექტორების დასასრული ემთხვევა ტრაექტორია, სადაც შევისწავლეთ ეს კვლევა. ჩვენ აღვნიშნავთ ამ ვექტორს რ.. სიმბოლოების გამოყენება δ არის აშკარა: δ რ. - ეს არის რადიუსის ვექტორს შორის განსხვავება რ. შესწავლილი ტრაექტორია სეგმენტისა და რადიუსის ვექტორით რ. 0 ამ სეგმენტის წარმოშობის 0 ქულა (ნახ. 1), ეს არის δ r \u003d. რ. − რ. 0 .

ტრაექტორია - ეს არის ხაზი, რომელიც სხეულის მოძრაობს.
გზა - ეს არის ტრასების ყველა მონაკვეთის სიგრძის თანხა, რომელიც მამოძრავებელია. ეს არის აღნიშნული δ, თუ საქმე ეხება ტრაექტორია საიტზე, თუ ჩვენ ვსაუბრობთ მთელ ტრაექტორიაზე დაკვირვებული მოძრაობის შესახებ. ზოგჯერ (იშვიათად) გზა აღინიშნება სხვა წერილით, მაგალითად, ლ (უბრალოდ არ მიუთითებს, როგორც R, ჩვენ უკვე ესაუბრა). გახსოვდეთ! გზა არის დადებითი სკალარი! მოძრაობის პროცესში გზა შეიძლება მხოლოდ გაზრდა.
მოძრაობის საშუალო სიჩქარე ვ. cf.
ვ. cf \u003d δ. რ./ Δt.
მყისიერი სიჩქარე მოძრავი v - ეს არის გამოხატვის მიერ განსაზღვრული ვექტორი
ვ. \u003d დ რ./ Dt.
საშუალო სიჩქარე გზა ვოლდი არის სკალარული, რომელიც განსაზღვრულია გამოხატვის მიერ
V cf \u003d δs / δt.
მაგალითად, სხვა აღნიშვნები ხშირად გვხვდება,
მყისიერი სიჩქარე გზა V არის სკალარული, რომელიც განსაზღვრულია გამოხატვის მიერ
მყისიერი მოძრაობის სიჩქარის მოდული და გზების მყისიერი სიჩქარე იგივეა, რადგან DR \u003d DS.
საშუალო აჩქარება ა.
ა. cf \u003d δ. ვ./ Δt.
მყისიერი აჩქარება (ან უბრალოდ, აჩქარება) ა. - ეს არის გამოხატვის მიერ განსაზღვრული ვექტორი
ა. \u003d დ ვ./ Dt.
Tangential (tangential) აჩქარება a τ (ქვედა ინდექსი არის ბერძნული პატარა ასო tau) - ეს ვექტორიეს არის ვექტორული პროექცია მყისიერი აჩქარება tangent ღერძი.
ნორმალური (Centripetal) აჩქარება A n - ეს ვექტორიეს არის ვექტორული პროექცია მყისიერი აჩქარება ნორმალურ ღერძზე.
Tanner აჩქარების მოდული
| ა. τ | \u003d dv / dt,
ანუ, ეს არის მყისიერი სიჩქარის წარმოებული მოდული.
ნორმალური აჩქარების მოდული
| ა. n | \u003d V 2 / r,
სად არის ტრაქტატის მრუდის რადიუსის მასშტაბები სხეულის მოძიების წერტილში.
Მნიშვნელოვანი! მინდა ყურადღება მიაქციოთ შემდეგს. არ გაურკვეველია ნოტაცია, რომელიც დაკავშირებულია tangent და ნორმალური დაჩქარება! ფაქტია, რომ ლიტერატურაში ამ შემთხვევაში, სრული ფოთოლი დაფიქსირდა.
გახსოვდეთ!
ა. τ - ეს არის ვექტორი tangential აჩქარება
ა. n - ეს ვექტორი ნორმალური აჩქარება.
ა. τ I. ა. არის ვექტორი სრული აჩქარების პროგნოზები მაგრამ on tangent ღერძი და ღერძი ნორმალური, შესაბამისად,
Τ არის პროექცია (სკალარული!) Tanner აჩქარება on tangent ღერძი,
N არის პროექტორის (scalar!) ნორმალური აჩქარება მთავარ ღერძი,
| ა. τ | - ეს ოდიოდი ვექტორი tangential აჩქარება
| ა. n | - ეს არის ოდიოდი ვექტორი ნორმალური აჩქარება.
განსაკუთრებით არ არის გაკვირვებული, თუ წაკითხვის ლიტერატურაში Curvilineear (კერძოდ, ბრუნვის) მოძრაობა, თქვენ ნახავთ, რომ ავტორი ქვეშ τ ესმის ვექტორი, მისი პროექცია და მისი მოდული. იგივე ეხება n. ყველაფერი, როგორც ამბობენ, "ერთ ბოთლში". და ეს, სამწუხაროდ, მთლიანად და ახლოს. უმაღლესი განათლების სახელმძღვანელოებიც კი არ არის გამონაკლისი, ბევრ მათგანს (მერწმუნეთ - უმრავლესობაში!) სრული დაბნეულობა ამაზე მეფობს.
ასე რომ, არ იცის Azov ვექტორი ალგებრა ან უგულებელყოფა მათ, ძალიან ადვილია სრულიად დაბნეული, როდესაც სწავლობს ფიზიკური პროცესების შესწავლა და ანალიზი. ამიტომ, ვექტორული ალგებრის ცოდნა არის ყველაზე წარმატებული მდგომარეობა წარმატებისთვის მექანიკის შესწავლაში. და არა მხოლოდ მექანიკა. მომავალში ფიზიკის სხვა მონაკვეთების შესწავლისას, თქვენ არაერთხელ დარწმუნდით, რომ.
მყისიერი კუთხის სიჩქარე (ან უბრალოდ, კუთხის სიჩქარე) ω - ეს არის გამოხატვის მიერ განსაზღვრული ვექტორი
ω \u003d დ φ / dt,
სადაც დ φ - უსასრულოდ მცირე ცვლილება კუთხის კოორდინაციაში (D φ - ვექტორი!).
მყისიერი კუთხის აჩქარება (ან უბრალოდ, კუთხის აჩქარება) ε - ეს არის გამოხატვის მიერ განსაზღვრული ვექტორი
ε \u003d დ ω / Dt.
Კომუნიკაცია შორის ვ., ω და რ.:
ვ. = ω × რ..
Კომუნიკაცია შორის V, ω და R:
Კომუნიკაცია შორის | ა. τ |, ε და r:
| ა. τ | \u003d ε ·.
ახლა წასვლა K. კინემატოგრაფიული განტოლებები კონკრეტული ტიპის მოძრაობა. ეს განტოლებები უნდა ვისწავლოთ გულით.
ფორმის და რექტლინერის მოძრაობის კინემატიკური განტოლება მას აქვს ფორმა:
რ. = რ. 0 + ვ. t,
სად რ. - რადიუსი-ვექტორული ობიექტი დროში T, რ. 0 არის იგივე პირველად T 0 (დაკვირვების დაწყებისას).
მუდმივი აჩქარების კინემატოგრაფიული განტოლება მას აქვს ფორმა:
რ. = რ. 0 + ვ. 0 T +. ა.t 2/2, სადაც ვ. 0 ობიექტის სიჩქარე დრო T 0.
სხეულის სიჩქარის განტოლება მუდმივი აჩქარებისას გადაადგილებისას მას აქვს ფორმა:
ვ. = ვ. 0 + ა. ტ.
პოლარული კოორდინატების წრეწირის გარშემო ერთიანი მოძრაობის კინემატოგრაფიული განტოლება მას აქვს ფორმა:
φ \u003d φ 0 + ω Z T,
სად არის სხეულის კუთხის კოორდინაცია დროის მომენტში, φ 0 არის დაკვირვების დაწყებისას სხეულის კუთხის კოორდინაცია (დროის საწყის მომენტში), ω z არის კუთხის სიჩქარის პროექცია ω Z ღერძზე (როგორც წესი, ამ ღერძზე როტაციის თვითმფრინავზე პერპენდიკულურია).
პოლარული კოორდინატების მუდმივი აჩქარების წრის წრის კინემატოგრაფიული განტოლება მას აქვს ფორმა:
φ \u003d φ 0 + ω 0Z T + ε Z T 2/2.
X ღერძის გასწვრივ ჰარმონიული oscillations- ის კინემატიკური განტოლება მას აქვს ფორმა:
X \u003d cos (ω t + φ 0),
სადაც არის ამპლიტუდა oscillations, ω არის ციკლური სიხშირე, φ 0 - საწყის ეტაპზე oscillations.
წერტილი სიჩქარე პროექცია, მერყეობს x ღერძის გასწვრივ, ამ ღერძზე ტოლია:
V x \u003d - ω · ცოდვა (ω t + φ 0).
ამ ღერძზე x ღერძის გასწვრივ რჩება ტოლია:
და x \u003d - ω 2 · · · cos (ω t + φ 0).
Კომუნიკაცია ციკლური სიხშირის ω, ჩვეულებრივი სიხშირე ƒ და oscillations t:
ω \u003d 2 ƒƒƒƒ \u003d 2 π / t (π \u003d 3.14 - ნომერი PI).
მათემატიკური pendulum მას აქვს oscillations t, გამოხატვის მიერ განსაზღვრული:
კვების გამოხატვის მრიცხველში - Pendulum- ის ფირმის სიგრძე, დენომინატორში - თავისუფალი შემოდგომაზე აჩქარება
Კომუნიკაცია შორის აბსოლუტური ვ. ABS, ნათესავი ვ. Rels და პორტატული ვ. თითო სიჩქარეზე:
ვ. ABS \u003d ვ. Rev +. ვ. თითო.
აქ, ალბათ, ყველა განსაზღვრება და ფორმულები, რომლებიც საჭიროა კინემატიკის პრობლემების მოგვარებისას. აღნიშნული ინფორმაცია მხოლოდ ბუნებაში არის მითითებული და ვერ შეცვლის ელექტრონული წიგნს, სადაც ხელმისაწვდომია, დეტალურად და, იმედი მაქვს, მექანიკის ამ მონაკვეთის თეორია.
SI სისტემაში გაზომვის ღირებულებების ძირითადი ერთეული ასეთი:
- სიგრძის ერთეული - მეტრი (1 მ),
- დრო - მეორე (1 წ),
- მასები - კილოგრამი (1 კგ),
- ნივთიერების ოდენობა არის mole (1 mol),
- ტემპერატურა - კელვინი (1 კ),
- ელექტრო მიმდინარე ძალები - amp (1 a),
- Reference: მსუბუქი ძალები - Candela (1 CD, რეალურად არ გამოიყენება სკოლის ამოცანების გადაჭრაში).
სისტემაში გათვლებით გაანგარიშებისას, კუთხეები იზომება რადიანებში.
თუ ფიზიკაში არ არის მითითებული, რომელშიც ერთეულებს უნდა ჰქონდეთ პასუხი, მას უნდა მიეცეს SI სისტემის ერთეულებში ან დერივატებში მათგან, რომლის მიხედვითაც გათვალისწინებული ღირებულებები. მაგალითად, თუ ამოცანა სჭირდება სიჩქარის პოვნას და არ იტყვის, თუ რა უნდა გამოხატოს, პასუხი უნდა მიეცეს მ / წმ.
კომფორტულად, ფიზიკის ამოცანები ხშირად უნდა გამოიყენონ დოლარი (შემცირება) და მრავალჯერადი (იზრდება) კონსოლები. ისინი შეიძლება გამოყენებულ იქნას ნებისმიერი ფიზიკური ზოლისთვის. მაგალითად, MM არის მილიმეტრი, CT - Kilotonne, NS - Nanosecond, MG - Megagrams, MMOL - Millimol, MCA - Microamper. გახსოვდეთ, რომ ფიზიკაში არ არსებობს ორმაგი კონსოლები. მაგალითად, ICG არის microgram და არა Millikilogram. გაითვალისწინეთ, რომ ღირებულებების დასამატებელი და გამონაკლისი, შეგიძლიათ მხოლოდ იმავე განზომილების მნიშვნელობრივად მოქმედებს. მაგალითად, კილოგრამი შეიძლება მხოლოდ კილოგრამით იყოს დაკეცილი, შეგიძლიათ მხოლოდ მილიმეტრამდე მილიმეტრამდე ჩამოიყვანოთ და ასე შემდეგ. ღირებულებების გადაცემისას, გამოიყენეთ შემდეგი ცხრილი.
გზა და მოძრავი
კინემატიკა ისინი მოუწოდებენ მექანიკის განყოფილებას, რომელშიც ორგანოების მოძრაობა განიხილება ამ მოძრაობის მიზეზების გასარკვევად.
მექანიკური მოძრაობა ორგანოები ზრუნავს ცვლილებას თავის პოზიციაში სივრცეში სხვა ორგანოებთან შედარებით.
ყველა ორგანო განსაზღვრავს ზომებს. თუმცა, ბევრ ამოცანას მექანიკაში არ არის საჭირო სხეულის ინდივიდუალური ნაწილების პოზიციები. თუ სხეულის ზომები მცირეა სხვა ორგანოებთან შედარებით, მაშინ ეს სხეული შეიძლება ჩაითვალოს მატერიალური პუნქტი. ასე რომ, როდესაც მანქანების გადაადგილება დიდი ხნის მანძილზე, შეგიძლიათ უგულებელყოთ ეს ხანგრძლივი, რადგან მანქანების სიგრძე მცირეა, ვიდრე დისტანციებთან შედარებით.
ეს არის ინტუიციური, რომ მოძრაობის მახასიათებლები (სიჩქარე, ტრაექტორია და ა.შ.) დამოკიდებულია იმაზე, თუ სად ვუყურებთ მას. აქედან გამომდინარე, მოძრაობის აღსაწერად აღსაწერად მინიშნება სისტემის კონცეფცია. Reference System (CO) - საცნობარო ორგანოს კომბინაცია (აბსოლუტურად მყარია), კოორდინატთა სისტემა, მმართველი (მოწყობილობის საზომი), საათი და დრო სინქრონიზატორი.
გადაადგილება დროთა განმავლობაში ერთი წერტილიდან მეორეზე, სხეული (მატერიალური პუნქტი) აღწერს მოცემულ ხაზს სხეულის გადაადგილების ტრაექტორია.
სხეულის გადაადგილება ისინი უწოდებენ მიმართულებით შემცირებას სხეულის თავდაპირველი პოზიციის დასასრულს. გადაადგილება არსებობს ვექტორული სიდიდე. მოძრაობის მოძრაობა შეიძლება გაიზარდოს მოძრაობის პროცესში, შემცირება და ნულოვანი გახდეს.
გავიდა გზა სხეულის მიერ გატარებული ტრაექტორია ტოლია. გზა არის სკალარული ღირებულება. გზა არ შეიძლება შემცირდეს. გზა მხოლოდ იზრდება არც მუდმივად (თუ სხეული არ გადადის). როდესაც სხეულისკენ გადადის curvilinear ტრაექტორია, მოძრაობის ვექტორული მოდული (სიგრძე) ყოველთვის იმოგზაურა გზას.
-თვის ფორმა (მუდმივი სიჩქარით) მოძრაობის გზა ლ. შეგიძლიათ იხილოთ ფორმულა:
სადაც: ვ. - სხეულის სიჩქარე, თ. - დრო, რომლითაც გადავიდა. კინემატიკის ამოცანების გადაჭრისას მოძრაობა, როგორც წესი, გეომეტრიული მოსაზრებებით არის დამზადებული. ხშირად, გეომეტრიული მოსაზრებები გადაადგილების ადგილმდებარეობისთვის მოითხოვს პითაგორების თეორემის ცოდნას.
საშუალო სიჩქარე
სისწრაფე - ვექტორული რაოდენობა, რომელიც ახასიათებს სხეულის გადაადგილების სიჩქარეს სივრცეში. სიჩქარე არის საშუალო და მყისიერი. მყისიერი სიჩქარე აღწერს ამ კონკრეტულ წერტილს ამ კონკრეტულ წერტილს, ხოლო საშუალო სიჩქარე ახასიათებს ყველა მოძრაობას მთლიანობაში, ზოგადად, თითოეული კონკრეტული ადგილის მოძრაობის დეტალების გარეშე.
საშუალო სიჩქარე გზა - ეს არის მთლიანი გზების თანაფარდობა მთელი გადაადგილებისთვის:

სადაც: ლ. სრული - ყველა გზა, რომ სხეული გავიდა, თ. სრული - ყველა დროის მოძრაობა.
მოძრაობის საშუალო სიჩქარე - ეს არის ყველა მოძრაობის თანაფარდობა მთელი დროის მანძილზე:

ეს მნიშვნელობა მიმართულია, ისევე როგორც სხეულის სრული მოძრაობა (ანუ, ბოლომდე მოძრაობის საწყისი წერტილიდან). ამავე დროს, არ უნდა დაგვავიწყდეს, რომ სრული მოძრაობა ყოველთვის არ არის მოძრაობის გარკვეულ ეტაპებზე მოძრაობის ალგებრული ოდენობით. სრული მოძრაობის ვექტორი მოძრაობის ცალკეულ ეტაპზე მოძრაობის ვექტორული თანხის ტოლია.
- კინემატოკაციებზე პრობლემების გადაჭრისას, არ არის ძალიან გავრცელებული შეცდომა. საშუალო სიჩქარე, როგორც წესი, არ არის ტოლია საშუალო არითმეტიკული სხეულის სიჩქარე თითოეულ ეტაპზე მოძრაობა. არითმეტიკული საშუალო მიღებულია მხოლოდ კონკრეტულ შემთხვევებში.
- და კიდევ უფრო მეტი, საშუალო სიჩქარე არ არის ერთ-ერთი სიჩქარის ერთ-ერთი სიჩქარე, რომელიც მოძრაობს მოძრაობის დროს, მაშინაც კი, თუ ეს სიჩქარე ჰქონდა შუალედურ ღირებულებასთან შედარებით სხვა სიჩქარით, რომელთანაც სხეული მიდიოდა.
თანაბარი სთხოვა სწორი მოძრაობა
აჩქარება - ვექტორული ფიზიკური რაოდენობა, რომელიც განსაზღვრავს სხეულის სხეულის შეცვლის სიჩქარეს. სხეულის დაჩქარება ეწოდება სიჩქარის ცვლილების თანაფარდობას იმ პერიოდში, რომლის დროსაც მოხდა სიჩქარე ცვლილება:
![]()
სადაც: ვ. 0 - თავდაპირველი სხეულის სიჩქარე, ვ. - საბოლოო სხეულის სიჩქარე (I.E. დროის შემდეგ თ.).
გარდა ამისა, თუ პრობლემის პირობებში სხვა რამ არ არის მითითებული, ჩვენ გვჯერა, რომ თუ სხეული აჩქარებით, ეს აჩქარება მუდმივად რჩება. ასეთი სხეულის მოძრაობა ეწოდება გაუმკირავებელი (ან თანაბარი). წონასწორობის მოძრაობით, სხეულის სიჩქარე მერყეობს იმავე ღირებულებასთან დაკავშირებით.
თანაბარი სთხოვა მოძრაობა რეალურად დაჩქარებულია, როდესაც სხეული ზრდის სიჩქარეს და შენელდება, როდესაც სიჩქარე მცირდება. სიმარტივისთვის, ამოცანები მოსახერხებელია ნელი მოძრაობისთვის, რათა დაჩქარდეს ნიშანი "-".
წინა ფორმულადან, კიდევ უფრო მეტი ფორმულა უნდა აღინიშნოს შეცვლის სიჩქარე დრო წონასწორობის მოძრაობით:
გადაადგილება (მაგრამ არა გზა) გათანაბრებისას, ფორმულები გამოითვლება ფორმულები:

![]()
ბოლო ფორმულაში გამოყენებული იყო ეკვივალენტური მოძრაობის ერთი თვისება. წონასწორობის მოძრაობით, საშუალო სიჩქარე შეიძლება გამოითვლება, როგორც არითმეტიკული საშუალო და საბოლოო სიჩქარე (ეს ქონება ძალიან მოსახერხებელია გამოიყენოს გარკვეული ამოცანების გადაჭრისას):
გზების გაანგარიშებით ყველაფერი უფრო რთულია. თუ სხეული არ შეცვლილა მოძრაობის მიმართულებით, მაშინ წონასწორობის სწორი მოძრაობა, გზა რიცხობრივად მოძრაობს. და თუ ეს შეიცვალა - აუცილებელია გზა ცალკე წაკითხვის დაწყებამდე (მომენტში) და გზა შეჩერების შემდეგ (შეცვლის მომენტი). და მხოლოდ დრო წინააღმდეგობა ფორმულაში ამ შემთხვევაში გამოიწვევს ტიპიური შეცდომა.
კოორდინირება წონასწორობის მოძრაობაში, კანონით ცვლილებები:

პროექტორის სიჩქარე წონასწორობის მოძრაობით, ის ამ კანონის მიხედვით იცვლება:
![]()
მსგავსი ფორმულები მიიღება დარჩენილი კოორდინირებული ღერძისთვის.
უფასო ვარდნა ვერტიკალური
ყველა ორგანოს სფეროში მიწის, ძალაუფლების სიმძიმის აქტებს. მხარდაჭერის ან შეჩერების არარსებობის შემთხვევაში, ეს ძალა იწვევს დედამიწის ზედაპირს. თუ თქვენ უგულებელყოფთ ჰაერის წინააღმდეგობას, მაშინ სხეულის გადაადგილება მხოლოდ სიმძიმის ქვეშ მოქმედებს. სიმძიმის ძალა ნებისმიერი ორგანოების მიმართ, მიუხედავად მათი ფორმის, მასობრივი და ზომის, იგივე აჩქარების, მოუწოდა დაჩქარება თავისუფალი შემოდგომაზე. დედამიწის ზედაპირზე სიმძიმის დაჩქარება თანხა:
ეს იმას ნიშნავს, რომ დედამიწის ზედაპირის მახლობლად ყველა სხეულში თავისუფალი ვარდნა ექვივალენტურია (მაგრამ არა აუცილებლად პირდაპირი) მოძრაობა. პირველ რიგში, განიხილეთ უფასო შემოდგომაზე მარტივი შემთხვევა, როდესაც სხეული მკაცრად ვერტიკალურად მოძრაობს. ასეთი მოძრაობა არის წონასწორობის პირდაპირი მოძრაობა, ამიტომ ყველა ადრე შესწავლილი ნიმუშები და აქცენტი ასეთი მოძრაობა განკუთვნილია უფასო შემოდგომაზე. მხოლოდ აჩქარება ყოველთვის ტოლია თავისუფალი შემოდგომაზე.
ტრადიციულად, თავისუფალი შემოდგომაზე, გამოიყენება ვერტიკალურად ღერძი oy გამოიყენება. აქ საშინელი არაფერია. საჭიროა ყველა ფორმულის ნაცვლად ინდექსის ნაცვლად " თ.»დაწერეთ" w." ამ ინდექსის მნიშვნელობა და ნიშნის განსაზღვრის წესი დაცულია. სად არის პირდაპირი ღერძი - თქვენი არჩევანი, რაც დამოკიდებულია პრობლემის მოგვარების კომფორტულად. პარამეტრები 2: up ან down.
მოდით მივცეთ რამდენიმე ფორმულა, რომელიც გადაჭრის ზოგიერთი კონკრეტული კინემატიკის ამოცანები უფასო ვარდნა მიერ ვერტიკალური. მაგალითად, სიჩქარე, რომელთანაც სხეული სიმაღლისგან ჩამოვარდება თ. თავდაპირველი სიჩქარის გარეშე:
სხეული სიმაღლეზე მოდის თ. თავდაპირველი სიჩქარის გარეშე:

მაქსიმალური სიმაღლე, რომელიც სხეულის გაიზრდება, მიტოვებული ვერტიკალურად up საწყისი საწყისი სიჩქარე ვ. 0, ამ სხეულის დრო მაქსიმალური სიმაღლისთვის და სრული ფრენის დროს (ამოსავალი წერტილიდან დაბრუნებამდე):
ჰორიზონტალური ჩააგდოს
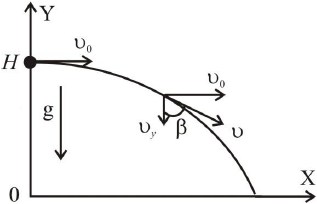
ჰორიზონტალური სახით თავდაპირველი სიჩქარით ვ. 0 სხეულის მოძრაობა მოხერხებულად ითვლება ორი მოძრაობის სახით: აქსისის გასწვრივ ერთიანი (ღერძის გასწვრივ, არ არსებობს მოძრაობის დაბრკოლება ან დახმარება) და წონასწორობის მოძრაობის გასწვრივ.
სიჩქარე ნებისმიერ დროს მიმართულია ტრაექტორია. ეს შეიძლება დაიშალა ორ კომპონენტად: ჰორიზონტალური და ვერტიკალური. ჰორიზონტალური კომპონენტი ყოველთვის უცვლელი რჩება და თანაბარია ვ. x \u003d. ვ. 0. და ვერტიკალური ზრდა დაჩქარებული მოძრაობის კანონების მიხედვით ვ. y \u003d. g.. სხვა სრული სხეულის სიჩქარე შეგიძლიათ იხილოთ ფორმულები:
![]()
![]()
მნიშვნელოვანია გვესმოდეს, რომ სხეულის დაეცემა მიწაზე არ არის დამოკიდებული იმაზე, თუ რა ჰორიზონტალური სიჩქარე იყო დააგდეს, მაგრამ განისაზღვრება მხოლოდ სიმაღლე, რომელთანაც სხეული დააგდეს. სხეულის ჩამოვარდნის დრო არის ფორმულა:

მიუხედავად იმისა, რომ სხეულის წვეთები, იგი ერთდროულად მოძრაობს გასწვრივ ჰორიზონტალური ღერძი. აქედან გამომდინარე, სხეულის ფრენის დიაპაზონი ან მანძილი, რომ სხეულის შეუძლია ფრენა გასწვრივ Oh Axis, იქნება ტოლი:
თითოეული კუთხე ჰორიზონტი და სხეულის სიჩქარე ადვილად იპოვონ თანაფარდობა:

ზოგჯერ ზოგჯერ ამოცანებში შეიძლება ითხოვოთ იმ დროს, როდესაც სრული სხეულის სიჩქარე იქნება გარკვეულ კუთხეს ვერტიკალური. მაშინ ეს კუთხე იქნება თანაფარდობით:

მნიშვნელოვანია იმის გაგება, თუ რომელი კუთხე გამოჩნდება ამოცანაში (ვერტიკალური ან ჰორიზონტალური). ეს დაგეხმარებათ აირჩიოთ სწორი ფორმულა. თუ ამ პრობლემას კოორდინირებული მეთოდით გადაჭრით, მაშინ CoNilibrium მოძრაობის კოორდინაციის ცვლილების ზოგადი ფორმულა:
![]()
იგი გარდაიქმნება მომდევნო კანონის მოძრაობის გასწვრივ Oy ღერძი ორგანოს მიტოვებული ჰორიზონტალური:
მისი დახმარებით, ჩვენ შეგვიძლია მოვძებნოთ სიმაღლე, რომელზეც სხეული ნებისმიერ დროს განთავსდება. ამავდროულად, სხეულის დროს დედამიწის კოორდინაციას უწევს სხეულის ღერძის გასწვრივ. ცხადია, ღერძის გასწვრივ, სხეული თანაბრად მოძრაობს, ამიტომ კოორდინატთა მეთოდით, ჰორიზონტალური კოორდინაცია კანონით შეიცვლება:
განშლის კუთხე ჰორიზონტზე (მიწიდან დედამიწაზე)
მაქსიმალური ლიფტინგის სიმაღლე, როდესაც ჰორიზონტზე კუთხეზე გადადის (საწყის დონეზე შედარებით):

ლიფტინგი დრო მაქსიმალური სიმაღლე, როდესაც სროლა კუთხე ჰორიზონტზე:

ფრენის დიაპაზონი და სხეულის სხეულის სრული დრო ჰორიზონტზე კუთხეზე (იმ პირობით, რომ ფრენა მთავრდება იმავე სიმაღლეზე, რომელთანაც სხეული დააგდეს, მაგალითად, მიწიდან დედამიწაზე):

სხეულის მინიმალური სხეულის მაჩვენებელი ჰორიზონტზე კუთხეზე მიტოვებულია ლიფტის უმაღლეს წერტილში და ტოლია:
ჰორიზონტზე კუთხის მაქსიმალური მაქსიმალური სხეულის მაქსიმალური ტემპერატურა არის მიწაზე, და ეწინააღმდეგება თავდაპირველად. ეს განცხადება მართალია მხოლოდ დედამიწისგან დედამიწაზე. თუ სხეული განაგრძობს ფრენებს ქვემოთ, საიდანაც იგი დააგდეს, იქ იქნება იზრდება და მეტი სიჩქარე.
სიჩქარის დამატება
ტელ მოძრაობა შეიძლება აღინიშნოს სხვადასხვა საცნობარო სისტემებში. კინემატოკაციების თვალსაზრისით, ყველა საცნობარო სისტემა თანაბარია. თუმცა, კინემატიკური მახასიათებლები მოძრაობის, როგორიცაა ტრაექტორია, მოძრავი, სიჩქარე, განსხვავდება სხვადასხვა სისტემებში. ღირებულებები დამოკიდებულია არჩევანი არჩევანი, რომელშიც მათი გაზომვა მზადდება ნათესავი. ამდენად, სხეულის მშვიდობა და მოძრაობა ნათესავია.
ამრიგად, აბსოლუტური სხეულის მაჩვენებელი ტოლია მისი სიჩქარის ვექტორული თანხის შედარებით მოძრავი კოორდინაციის სისტემასთან და მობილური საცნობარო სისტემის სიჩქარით. ან, სხვა სიტყვებით რომ ვთქვათ, სხეულის სიჩქარე ფიქსირებული მინიშნება სისტემაში ტოლია სხეულის სიჩქარის ვექტორული ოდენობით მოძრავი საცნობარო სისტემაში და მოძრავი საცნობარო სისტემის სიჩქარე შედარებით ფიქსირებული.
ერთიანი მოძრაობა წრეზე
სხეულის მოძრაობის გარშემო წრეწირის გარშემო არის Curvilinear მოძრაობის განსაკუთრებული შემთხვევა. ამ ტიპის მოძრაობა ასევე განიხილება კინემატიკაში. ერთად curved მოძრაობის, სხეულის სიჩქარე ვექტორი ყოველთვის მიზნად ისახავს tangent trajectory. იგივე ხდება, როდესაც წრეზე მამოძრავებელი ხდება (იხ. ფიგურა). სხეულის ირგვლივ სხეულის ერთგვაროვანი მოძრაობა ხასიათდება რამდენიმე ღირებულებით.

პერიოდი - დრო, რომლისთვისაც სხეული, წრეზე მოძრაობს, ერთი სრული მხრივ ხდის. გაზომვის ერთეული - 1 ს. პერიოდი გამოითვლება ფორმულით:
სიხშირე - რევოლუციების რიცხვი, რომელმაც სხეულის გადაადგილება გამოიწვია, ერთდროულად ერთეულში. გაზომვის ერთეული - 1 Rev / s ან 1 Hz. სიხშირე გამოითვლება ფორმულით:
ორივე ფორმულაში: ნ. - დროის რევოლუციების რაოდენობა თ.. როგორც ჩანს, ზემოთ ჩამოთვლილი ფორმულებიდან ჩანს, ინტერპრეტაციის სიდიდის პერიოდი და სიხშირე:
![]()
-თვის ერთიანი როტაცია სიჩქარე ორგანოები განისაზღვრება შემდეგნაირად:
![]()
სადაც: ლ. - თანაბარი პერიოდის განმავლობაში სხეულის წრის ან გზების სიგრძე თ.. როდესაც სხეული მოძრაობს წრეში, მოსახერხებელია კუთხის მოძრაობის განხილვა φ (ან როტაციის კუთხე), იზომება რადიელებში. კუთხის სიჩქარე ω ამ ეტაპზე ორგანოები მოუწოდებენ მცირე კუთხის მოძრაობის თანაფარდობას δ φ მცირე პერიოდის განმავლობაში δ თ.. ცხადია, თანაბარი პერიოდის განმავლობაში თ. სხეული გაივლის კუთხეს 2-ზე π აქედან გამომდინარე, ერთიანი მოძრაობის გარშემო წრე, ფორმულები ხორციელდება:
![]()
კუთხის სიჩქარე იზომება რადიოებში. ნუ დაივიწყებთ კუთხეების გადანაცვლებას რადიანებს. Dougie სიგრძე ლ. ასოცირებული კუთხე როტაციის მიერ თანაფარდობა:
კომუნიკაცია ხაზოვანი სიჩქარის მოდულის შორის ვ. და კუთხის სიჩქარე ω :
![]()
როდესაც სხეული მუდმივად მოდულთან ერთად მოძრაობს, მხოლოდ სიჩქარის ვექტორული ცვლილებების მხოლოდ მიმართულებით, ამიტომ სხეულის გარშემო მოძრაობის მოძრაობა მუდმივი სიჩქარის გარშემო სიჩქარით მოძრაობს (მაგრამ არ არის ტოლი), მას შემდეგ, რაც სიჩქარის ცვლილებების მიმართულებით. ამ შემთხვევაში, დაჩქარება ხდება რადიუსის გასწვრივ წრის ცენტრში. მას ნორმალური, ან centripetal აჩქარებამას შემდეგ, რაც წრის ნებისმიერ წერტილში აჩქარების ვექტორი მიმართულია მის ცენტრში (იხ. ფიგურა).

ცენტრიფფეტული აჩქარების მოდული წრფივი ასოცირდება v ამ საიტზე. ამისათვის საჭიროა რამე, კერძოდ, ფიზიკასა და მათემატიკაში CT- ის პრეპარატების დაძლევა, თეორიის შესწავლა და ყოველდღიურად სამი ან ოთხი საათის პრობლემების გადაჭრა. ფაქტია, რომ CT არის გამოცდა, სადაც არ არის საკმარისი იმისათვის, რომ იცოდეს ფიზიკა ან მათემატიკა, თქვენ უნდა შეძლოთ სწრაფად და უშედეგოდ, რომ გადაჭრას დიდი რაოდენობით ამოცანები სხვადასხვა თემებზე და სხვადასხვა სირთულეზე. თქვენ შეგიძლიათ მხოლოდ ისწავლონ როგორ უნდა გადაწყვიტოს ათასობით ამოცანები.
წარმატებული, გულმოდგინე და პასუხისმგებელი შესრულება ამ სამი ელემენტი, ისევე როგორც პასუხისმგებელი შესწავლა საბოლოო სასწავლო ტესტები, საშუალებას მოგცემთ აჩვენოთ დიდი შედეგი CT, მაქსიმალურად, რაც თქვენ შეუძლია.
ნაპოვნია შეცდომა?
თუ ფიქრობთ, რომ თქვენ, როგორც ჩანს, შეცდომა გაქვთ ტრენინგზე, გთხოვთ, დაწეროთ ელ.ფოსტით (). წერილში, მიუთითეთ საგანი (ფიზიკა ან მათემატიკა), სახელი ან ნომერი თემა ან ტესტირება, ამოცანა ნომერი ან ადგილი ტექსტში (გვერდი), სადაც ფიქრობთ, რომ არსებობს შეცდომა. ასევე აღწერს რა არის სავარაუდო შეცდომა. თქვენი წერილი არ დარჩება შეუმჩნეველი, შეცდომა ან იქნება დაფიქსირებული, ან განმარტავს, რატომ არ არის შეცდომა.