Untuk memahami apa studi mekanik, perlu untuk mempertimbangkan apa arti gerakan dalam arti paling umum. Nilai kata ini menyiratkan perubahan dalam sesuatu. Misalnya, gerakan politik mengadvokasi kesetaraan lapisan populasi yang berbeda, terlepas dari afiliasi rasial mereka. Sebelumnya, itu tidak, maka sesuatu berubah dan sekarang setiap orang memiliki hak yang sama. Ini adalah pergerakan peradaban di depan. Contoh lain adalah lingkungan. Di masa lalu, memilih di alam, tidak ada yang memikirkan apa yang membuat sampah setelah dirinya sendiri. Saat ini, setiap orang yang beradab akan menjemputnya dengan dia dan mengambilnya di tempat yang ditunjuk secara khusus untuk pembuangan lebih lanjut.
Sesuatu seperti ini dapat diamati pada mekanika. Dengan gerakan mekanis, posisi tubuh berubah di ruang relatif terhadap item lain dari waktu ke waktu. Tugas utama mekanik adalah untuk menunjukkan di mana objek kapan saja, mengingat bahkan yang belum datang. Yaitu, untuk memprediksi posisi tubuh pada waktu yang ditentukan, dan bukan hanya untuk mengetahui di mana itu di masa lalu.
Kinematika adalah bagian dari mekanika yang mempelajari pergerakan tubuh tanpa menganalisis penyebabnya. Ini berarti bahwa dia mengajar untuk tidak menjelaskan, tetapi untuk menggambarkan. Artinya, buat dengan cara yang memungkinkan untuk mengatur posisi tubuh kapan saja. Konsep dasar kinematika termasuk kecepatan, akselerasi, jarak, waktu dan bergerak.
Kesulitan dalam deskripsi gerakan
Masalah pertama dengan wajah kinematika adalah setiap tubuh memiliki ukuran tertentu. Misalkan perlu untuk menggambarkan pergerakan beberapa objek. Ini berarti belajar bagaimana menunjuk posisinya kapan saja. Tetapi setiap item mengambil beberapa tempat di luar angkasa. Artinya, bahwa semua bagian dari objek ini pada titik waktu yang sama menempati posisi yang berbeda.

Apa gunanya dalam hal ini harus diambil untuk menggambarkan lokasi seluruh subjek? Jika Anda mempertimbangkan masing-masing, maka perhitungan akan terlalu kompleks. Oleh karena itu, keputusan untuk menjawab pertanyaan ini dapat dengan mudah disederhanakan. Jika semua titik satu tubuh bergerak ke arah yang sama, itu sudah cukup untuk menggambarkan gerakan yang mengandung tubuh ini.
Jenis gerakan dalam kinematika
Ada tiga jenis:
- Ada gerakan progresif, di mana setiap pengeluaran langsung dalam tubuh tetap sejajar dengan dirinya sendiri. Misalnya, mobil yang bergerak di sepanjang jalan raya membuat jenis gerakan seperti itu.
- Rotasi ini disebut pergerakan tubuh di mana semua poinnya bergerak di sekitar lingkaran dengan pusat-pusat berbaring pada satu garis lurus, disebut poros rotasi. Misalnya, rotasi Bumi relatif terhadap porosnya.
- Osilatori adalah gerakan di mana tubuh mengulangi lintasannya melalui periode waktu tertentu. Misalnya, pergerakan pendulum.
Konsep Dasar Kinematika - Poin Bahan
Setiap gerakan kompleks dapat digambarkan sebagai kombinasi dari dua spesies sederhana - progresif dan rotasi. Misalnya, roda kendaraan atau yula, berdiri di atas bergerak secara langsung, berpartisipasi secara bersamaan dalam dua jenis gerakan ini.

Tetapi bagaimana jika pergerakan tubuh tidak dapat diserahkan sebagai kombinasi? Misalnya, jika mobil mengendarai jalan bergelombang, posisinya akan berubah sangat sulit. Jika Anda menghitung hanya fakta bahwa transportasi ini bergerak dari satu kota ke kota lain, maka dalam situasi seperti itu tidak masalah ukuran tubuh yang bergerak dari titik A ke titik B dan mereka dapat diabaikan. Dalam hal ini, penting hanya untuk jam berapa mobil melewati jarak tertentu dan pada kecepatan apa bergerak.
Namun, harus diingat bahwa pengabaian ukuran tidak diperbolehkan dalam setiap tugas. Misalnya, jika Anda menghitung pergerakan di parkir mobil, lalu mengabaikan besarnya tubuh ini akan menghasilkan konsekuensi yang merugikan. Oleh karena itu, hanya dalam situasi di mana dalam tugas tertentu, dimensi dari objek bergerak dapat diabaikan, maka tubuh seperti itu disebut titik material.
Formula kinematika.
Angka-angka dimana posisi titik diatur dalam ruang disebut koordinat. Untuk menentukannya pada garis lurus, hanya satu angka ketika sampai pada permukaan, maka dua, tentang ruang - tiga. Lebih banyak angka di dunia tiga dimensi (untuk menggambarkan posisi titik material) tidak diperlukan.

Ada tiga persamaan dasar untuk konsep kinematika, sebagai bagian tentang pergerakan Tel:
- v \u003d u + at.
- S \u003d ut + 1 / 2at 2.
- v 2 \u003d u 2 + 2as.
v \u003d kecepatan pamungkas,
u \u003d kecepatan awal
a \u003d Akselerasi
s \u003d Jarak yang ditempuh oleh tubuh
Rumus kinematika dalam ruang satu dimensi:
X - X O \u003d V O T + 1 / 2A T2
V 2 \u003d v o 1 + 2a (x - x o)
X - x o \u003d 1 \\ 2 (v o + v) t
Dimana,
V - kecepatan akhir (m / s),
V o - kecepatan awal (m / s),
a - Akselerasi (m / s 2),
t - Waktu,
X - posisi akhir (m),
Formula kinematika dalam ruang dua dimensi
Karena persamaan berikut digunakan untuk menggambarkan titik material pada pesawat, perlu mempertimbangkan sumbu X dan Y.
Mempertimbangkan arah X:
x \u003d. konstan.
V fx \u003d v i x + a x Δt
X f \u003d x i + v i x Δt + 1 / 2a x Δt 2
Δt \u003d v fx -v ix / a x
V fx 2 \u003d v ix 2 + 2x Δx
X f \u003d x i + 1/2 (v fx + v ix) Δ t.
Dan mempertimbangkan y:
a y \u003d. konstan.
V fy \u003d v ey + a y Δt
y f \u003d y i + v Δt + 1/2 a x Δt 2
ΔT \u003d V FY - V IY / A Y
V fy 2 \u003d v iy 2 + 2 ay Δ y
y f \u003d y i +1/2 (v fy + v iy) Δt.
V f - kecepatan akhir (m / s),
V i - Kecepatan awal (m / s),
a - Akselerasi (m / c 2),
t - Waktu,
X - posisi akhir (m),
X 0 - posisi awal (m).
Pindahkan proyektil yang ditinggalkan adalah contoh terbaik untuk menggambarkan pergerakan objek dalam dua dimensi. Di sini tubuh bergerak, baik dalam posisi vertikal Y, dan dalam posisi horizontal X, sehingga kita dapat mengatakan bahwa objek tersebut memiliki dua kecepatan.
Contoh tugas kinematika
Tugas 1.: Kecepatan truk awal adalah nol. Awalnya, objek ini sedang beristirahat. Ini mulai bertindak akselerasi yang seragam selama interval waktu 5,21 detik. Jarak yang ditempuh oleh truk adalah 110 m. Temukan akselerasi.
Keputusan:
Jarak s \u003d 110 m berlalu
Kecepatan awal v i \u003d 0,
Waktu t \u003d 5,21 s,
Akselerasi A \u003d?
Menggunakan konsep dasar dan rumus kinematika, dapat disimpulkan bahwa
s \u003d v i t + 1/2 a t 2,
110 m \u003d (0) × (5.21) + 1/2 × a (5.21) 2,
a \u003d 8,10 m / s 2.
Tugas 2: Titik bergerak sepanjang sumbu x (dalam cm), setelah t detik dari perjalanan, itu dapat disampaikan menggunakan persamaan x \u003d 14t 2 - t + 10. perlu untuk menemukan titik rata-rata titik, asalkan t \u003d 3s?
Keputusan:
Posisi titik pada t \u003d 0 adalah x \u003d 10 cm.
Pada t \u003d 3s, x \u003d 133 cm.
Kecepatan rata-rata, v av \u003d Δx / Δt \u003d 133-10 / 3-0 \u003d 41 cm / s.
Apa gunanya referensi
Pada gerakan hanya dapat dikatakan jika ada sesuatu, sehubungan dengan mana perubahan pada posisi objek yang dipelajari dipertimbangkan. Objek semacam itu disebut badan referensi dan selalu diasumsikan untuk yang tetap.
Jika tugas tidak ditentukan di mana sistem laporan memindahkan titik material, lahan default dianggap sebagai badan default. Namun, ini tidak berarti bahwa untuk waktu yang tetap pada titik waktu tertentu, objek relatif terhadap pergerakan yang dilakukan, apa pun yang nyaman untuk perhitungan tidak dapat diambil. Misalnya, untuk tubuh referensi, Anda dapat mengambil kereta yang bergerak, memutar mobil dan sebagainya.
Sistem referensi dan nilainya dalam kinematika
Untuk menggambarkan gerakan, tiga komponen diperlukan:
- Sistem koordinasi.
- Titik referensi.
- Perangkat untuk waktu pengukuran.

Tubuh referensi, sistem koordinat yang terkait dengannya dan perangkat untuk mengukur waktu membentuk sistem referensi. Tidak ada artinya untuk berbicara tentang gerakan, jika tidak menentukannya. Sistem referensi yang dipilih dengan benar memungkinkan Anda untuk menyederhanakan deskripsi gerakan dan, sebaliknya, rumit jika dipilih.
Karena alasan inilah umat manusia percaya bahwa matahari itu bergerak di sekitar bumi dan berada di tengah-tengah alam semesta. Gerakan yang kompleks dari tokoh-tokoh yang terkait dengan fakta bahwa pengamat duniawi berada dalam sistem referensi, yang sangat rumit bergerak. Bumi berputar di sekitar porosnya dan pada saat yang sama di sekitar matahari. Bahkan, jika Anda mengubah sistem referensi, maka semua gerakan tubuh surgawi mudah dijelaskan. Ini pada satu waktu dibuat oleh Copernicus. Dia mengusulkan deskripsi sendiri tentang tatanan dunia, di mana matahari tidak bergerak. Mengenai itu, menggambarkan pergerakan planet ini jauh lebih mudah daripada jika tubuh adalah bumi.

Konsep dasar kinematika - jalur dan lintasan
Biarkan titik tertentu pertama kali berada di posisi A, setelah beberapa waktu ternyata berada di posisi V. Di antara mereka Anda dapat menghabiskan satu baris. Tetapi agar langsung ini membawa lebih banyak informasi tentang gerakan itu, yaitu, jelas dari mana dan di mana tubuh bergerak, itu seharusnya bukan hanya segmen, tetapi arah, biasanya dilambangkan dengan huruf S. Body Movement, adalah Disebut vektor yang dilakukan dari posisi awal subjek dalam hingga terbatas.

Jika tubuh awalnya pada titik A, dan kemudian ternyata pada titik B, ini tidak berarti bahwa ia hanya bergerak dalam garis lurus. Dari satu posisi ke posisi lain, Anda bisa mendapatkan jumlah cara yang tak terbatas. Garis di mana tubuh bergerak, adalah konsep dasar kinematika lainnya - lintasan. Dan panjangnya disebut jalur, yang biasanya dilambangkan dengan huruf L atau L.
Sesi ini mendekati, dan sekarang saatnya bagi kita untuk berpindah dari teori ke praktik. Pada akhir pekan kami duduk dan berpikir bahwa banyak siswa harus memiliki formula fisik yang baik di tangan. Rumus kering dengan penjelasan: Secara singkat, ringkas, tidak ada yang berlebihan. Hal yang sangat berguna saat menyelesaikan tugas, Anda tahu. Ya, dan pada ujian, ketika itu bisa "melompat keluar" dari kepala, persis bahwa hari sebelum dirayapi, pilihan seperti itu akan melayani layanan yang sangat baik.
Sebagian besar tugas biasanya diminta untuk tiga bagian fisika paling populer. saya t mekanika, termodinamika dan fisika molekuler., listrik. Dan bawa mereka!
Formula Dasar untuk Dinamika Fisika, Kinematika, Statis
Mari kita mulai dengan yang paling sederhana. Gerakan lurus dan seragam favorit lama.
Formula Kinematika:
Tentu saja, kita tidak akan melupakan gerakan dalam lingkaran, dan kemudian melanjutkan ke dinamika dan hukum Newton.

Setelah dinamika, sekarang saatnya untuk mempertimbangkan kondisi ekuilibrium tubuh dan cairan, I.E. Statika dan Hidrostatika

Sekarang kami menyajikan formula dasar tentang topik "kerja dan energi". Di mana kita tanpa mereka!

Rumus utama fisika molekuler dan termodinamika
Kami akan menyelesaikan bagian mekanika dengan formula pada fluktuasi dan gelombang dan beralih ke fisika molekuler dan termodinamika.

Koefisien yang bermanfaat, Hukum Gay-Loursak, persamaan Klapiireron-Mendeleev - semua jantung formula yang imut ini dikumpulkan di bawah ini.
Ngomong-ngomong! Untuk semua pembaca kami sekarang ada diskon 10% pada semua jenis pekerjaan.

Formula Dasar untuk Fisika: Listrik
Sudah waktunya untuk pindah ke listrik, meskipun ia lebih sedikit mencintai termodinamika. Kami mulai dengan elektrostatika.


Dan, di bawah fraksi drum, selesaikan formula untuk hukum OMA, induksi elektromagnetik dan osilasi elektromagnetik.

Itu saja. Tentu saja, akan memungkinkan untuk membawa seluruh formula gunung, tetapi ini bukan apa-apa. Ketika formula menjadi terlalu banyak, Anda dapat dengan mudah bingung, dan di sana mereka dapat melelehkan otak. Kami berharap lembar curang kami dari formula dasar dalam fisika akan membantu untuk menyelesaikan tugas-tugas favorit lebih cepat dan lebih efisien. Dan jika Anda ingin mengklarifikasi sesuatu atau tidak menemukan formula yang diperlukan: tanyakan para ahli layanan siswa. Penulis kami menyimpan ratusan formula di kepala dan mengklik tugas-tugas seperti kacang. Kontak, dan segera tugas apa pun akan Anda "pada gigi."
Pertama-tama, perlu dicatat bahwa itu akan tentang titik geometris, yaitu, area ruang yang tidak memiliki ukuran. Ini untuk gambar abstrak ini (model) dan semua definisi dan formula yang disajikan di bawah ini. Namun, untuk singkatnya saya akan terus berbicara tentang gerakan tubuh, obyek atau partikel. Inilah yang hanya saya buat lebih mudah bagi Anda untuk membaca. Tetapi selalu ingat bahwa kita berbicara tentang titik geometris.
RADIUS VECTOR. Poin adalah vektor, yang mulai bertepatan dengan awal sistem koordinat, dan akhirnya pada titik ini. Vektor radius diindikasikan, sebagai aturan, surat itu r.. Sayangnya, beberapa penulis menunjuk suratnya s.. Saya sangat menyarankan jangan gunakan Penunjukan s. Untuk vektor radius. Faktanya adalah bahwa mayoritas penulis (baik domestik maupun luar negeri) menggunakan huruf s untuk menunjukkan jalur, yang merupakan skalar dan ke radius-vektor, sebagai aturan, tidak memiliki hubungan. Jika Anda menunjukkan vektor radius sebagai s.Anda dapat dengan mudah bingung. Sekali lagi, kami, seperti semua orang normal, akan menggunakan notasi berikut: r. - Poin radius-vektor, s - jalur yang ditularkan pada titik.
Vektor gerakan (Seringkali mereka mengatakan sederhana - pindah) - ini adalah vektor.Yang mulai bertepatan dengan titik lintasan di mana ada tubuh ketika kami mulai mempelajari gerakan ini, dan akhir dari vektor ini bertepatan dengan titik lintasan tempat kami mempelajari penelitian ini. Kami akan menunjukkan vektor ini sebagai δ r.. Penggunaan simbol δ jelas: δ r. - Ini perbedaan antara vektor radius r. Titik akhir dari segmen lintasan yang diteliti dan vektor radius r. 0 titik asal segmen ini (Gbr. 1), yaitu, δ r \u003d. r. − r. 0 .

Lintasan - Ini adalah garis di mana tubuh bergerak.
Cara - Ini adalah jumlah dari panjang semua bagian lintasan yang dapat dilalui secara berurutan oleh tubuh saat mengemudi. Ini dilambangkan ΔS, jika datang ke situs lintasan, atau S, jika kita berbicara tentang seluruh lintasan gerakan yang diamati. Kadang-kadang (jarang) path dilambangkan dengan huruf lain, misalnya, L (hanya tidak menunjukkannya sebagai R, kita sudah membicarakannya). Ingat! Jalannya adalah skalar positif! Jalan dalam proses gerakan bisa hanya meningkat.
Kecepatan rata-rata gerakan v. lih. CF
v. cf \u003d δ. r./ Δt.
Kecepatan instan bergerak v - Ini adalah vektor yang ditentukan oleh ekspresi
v. \u003d D. r./ Dt.
Jalur kecepatan rata-rata V Wed adalah skalar yang didefinisikan oleh ekspresi
V CF \u003d ΔS / ΔT.
Penunjukan lain sering ditemukan, misalnya,
Jalur kecepatan instan. v adalah skalar yang didefinisikan oleh ekspresi
Modul kecepatan gerakan instan dan kecepatan instan path adalah sama, sejak DR \u003d DS.
Akselerasi rata-rata sEBUAH.
sEBUAH. cf \u003d δ. v./ Δt.
Akselerasi instan (atau sederhana, percepatan) sEBUAH. - Ini adalah vektor yang ditentukan oleh ekspresi
sEBUAH. \u003d D. v./ Dt.
Akselerasi tangensial (tangential) a τ (indeks lebih rendah adalah tau huruf kecil Yunani) - itu vektor.itu adalah proyeksi vektor. Akselerasi instan pada sumbu singgung.
Akselerasi normal (centripetal) a n - itu vektor.itu adalah proyeksi vektor. Akselerasi instan pada sumbu normal.
Modul Akselerasi Tanner.
| sEBUAH. τ | \u003d DV / DT,
Artinya, ini adalah modul derivatif dengan kecepatan instan.
Modul akselerasi normal
| sEBUAH. N | \u003d V 2 / r,
Di mana r adalah besarnya jari-jari kelengkungan lintasan pada titik menemukan tubuh.
Penting! Saya ingin memperhatikan hal-hal berikut. Jangan bingung dengan notasi tentang akselerasi garis singgung dan normal! Faktanya adalah bahwa dalam literatur pada kesempatan ini, leerfer lengkap telah diamati.
Ingat!
sEBUAH. τ - itu vektor. akselerasi tangensial
sEBUAH. n - itu vektor. Akselerasi normal.
sEBUAH. τ I. sEBUAH. n adalah vektor. Proyeksi akselerasi lengkap tapi pada sumbu singgung dan sumbu normal, masing-masing,
A τ adalah proyeksi (skalar!) Percepatan tanner pada sumbu tangen,
A n adalah proyeksi (skalar!) Akselerasi normal pada sumbu utama,
| sEBUAH. τ | - itu modul vektor. akselerasi tangensial
| sEBUAH. N | - ini adalah modul vektor. Akselerasi normal.
Terutama tidak terkejut jika, membaca dalam literatur pada gerakan curvilinear (khususnya, rotasi), Anda akan menemukan bahwa penulis di bawah τ memahami vektor, dan modulnya, dan modulnya. Hal yang sama berlaku untuk n. Segalanya, seperti yang mereka katakan, "dalam satu botol". Dan ini, sayangnya, sepenuhnya dan dekat. Bahkan buku teks untuk pendidikan tinggi tidak terkecuali, di banyak dari mereka (percaya padaku - di sebagian besar!) Kebingungan penuh memerintah tentang ini.
Jadi, tidak tahu aljabar vektor AZOV atau mengabaikannya, sangat mudah untuk sepenuhnya bingung ketika mempelajari dan menganalisis proses fisik. Oleh karena itu, pengetahuan tentang aljabar vektor adalah kondisi paling sukses untuk sukses Dalam studi mekanik. Dan tidak hanya mekanik. Di masa depan, ketika mempelajari bagian fisika lain, Anda berulang kali memastikan itu.
Kecepatan sudut instan (atau sederhana, kecepatan sudut) ω - Ini adalah vektor yang ditentukan oleh ekspresi
ω \u003d D. φ / dt,
Dimana D. φ - Perubahan kecil yang tak terbatas dalam koordinat sudut (d φ - vektor!).
Akselerasi sudut instan (atau sederhana, akselerasi sudut.) ε - Ini adalah vektor yang ditentukan oleh ekspresi
ε \u003d D. ω / Dt.
Komunikasi antara v., ω dan r.:
v. = ω × r..
Komunikasi Antara v, ω dan R:
Komunikasi Antara | sEBUAH. τ |, ε dan R:
| sEBUAH. τ | \u003d ε · r.
Sekarang pergi ke K. persamaan kinematik. jenis gerakan tertentu. Persamaan ini harus dipelajari dengan hati.
Persamaan kinematik gerakan seragam dan bujursangkar Ini memiliki bentuk:
r. = r. 0 + v. t,
Dimana r. - objek radius-vektor pada waktu t, r. 0 sama pada waktu awal t 0 (pada saat dimulainya pengamatan).
Persamaan sinematik dari akselerasi konstan Ini memiliki bentuk:
r. = r. 0 + v. 0 t +. sEBUAH.t 2/2, di mana v. 0 Kecepatan objek pada saat t 0.
Persamaan untuk kecepatan tubuh saat bergerak dengan akselerasi yang konstan Ini memiliki bentuk:
v. = v. 0 + sEBUAH. t.
Persamaan sinematik dari gerakan seragam di sekitar keliling dalam koordinat kutub Ini memiliki bentuk:
φ \u003d φ 0 + ω Z T,
Di mana φ adalah koordinat sudut tubuh pada saat waktu, φ 0 adalah sudut koordinat tubuh pada saat dimulainya observasi (pada saat waktu awal), ω Z adalah proyeksi kecepatan sudut ω Pada sumbu Z (biasanya sumbu ini dipilih tegak lurus terhadap bidang rotasi).
Persamaan kinematik dari lingkaran lingkaran dengan akselerasi konstan dalam koordinat kutub Ini memiliki bentuk:
φ \u003d φ 0 + ω 0z t + ε z t 2/2.
Persamaan kinematik dari osilasi harmonik sepanjang sumbu x Ini memiliki bentuk:
X \u003d a cos (Ω t + φ 0),
Di mana A adalah amplitudo osilasi, ω adalah frekuensi siklik, φ 0 - fase awal osilasi.
Proyeksi kecepatan titik, berfluktuasi di sepanjang sumbu x, pada sumbu ini sama dengan:
V x \u003d - ω · a · sin (ω t + φ 0).
Proyeksi akselerasi titik, berfluktuasi di sepanjang sumbu x, pada sumbu ini sama dengan:
Dan x \u003d - Ω 2 · A · cos (ω t + φ 0).
Komunikasi Antara frekuensi siklik ω, frekuensi biasa ƒ dan periode osilasi t:
Ω \u003d 2 㟟 \u003d 2 π / t (π \u003d 3.14 - angka PI).
Pendulum matematika Ini memiliki periode osilasi t, didefinisikan oleh ekspresi:
Pada pembilang ekspresi pemberian makan - panjang filamen pendulum, dalam penyebut - akselerasi jatuh bebas
Komunikasi antara absolute. v. Abs, relatif v. Rel dan portabel v. Per kecepatan:
v. abs \u003d v. Rev +. v. per.
Di sini, mungkin, semua definisi dan formula yang mungkin diperlukan ketika memecahkan masalah kinematika. Informasi di atas hanya referensi di alam dan tidak dapat mengganti e-book, di mana itu tersedia, secara rinci dan, saya harap, menarik teori bagian mekanisme ini.
Unit dasar nilai pengukuran dalam sistem SI Seperti itu:
- satuan panjang - meter (1 m),
- waktu - Kedua (1 detik),
- massa - kilogram (1 kg),
- jumlah zat adalah mol (1 mol),
- temperatur - Kelvin (1 K),
- kekuatan arus listrik - amp (1 a),
- Referensi: Forces Light - Candela (1 CD, sebenarnya tidak digunakan dalam menyelesaikan tugas sekolah).
Saat menghitung perhitungan dalam sistem, sudut diukur dalam radian.
Jika tugas dalam fisika tidak ditentukan, di mana unit perlu dijawab, perlu diberikan dalam satuan sistem SI atau dalam derivatif dari mereka nilai yang sesuai dengan ukuran fisik yang ditanyakan dalam tugas. Misalnya, jika tugas perlu menemukan kecepatan, dan tidak mengatakan apa yang perlu diungkapkan, jawabannya harus diberikan dalam m / s.
Untuk kenyamanan, tugas-tugas dalam fisika sering harus menggunakan dolar (reduksi) dan beberapa (meningkatkan) konsol. Mereka dapat diterapkan pada ukuran fisik apa pun. Misalnya, MM adalah milimeter, CT - Kilotonne, NS - NanoSecond, MG - Megagrams, MMOL - Millimol, MCA - Microamper. Ingatlah bahwa tidak ada konsol ganda dalam fisika. Misalnya, ICG adalah mikrogram, dan bukan milikilogram. Perhatikan bahwa saat menambah dan mengurangi nilai, Anda hanya dapat mengoperasikan nilai-nilai dimensi yang sama. Misalnya, kilogram hanya dapat dilipat dengan kilogram, Anda hanya dapat mengurangi milimeter dari milimeter, dan sebagainya. Saat mentransfer nilai, gunakan tabel berikut.
Jalur dan pindah
Kinematika. Mereka menyebut bagian mekanika di mana pergerakan tubuh dipertimbangkan tanpa mengklarifikasi alasan gerakan ini.
Gerakan mekanis. Tubuh menyebut perubahan dalam posisinya di ruang relatif terhadap tubuh lain dari waktu ke waktu.
Setiap tubuh telah menentukan dimensi. Namun, dalam banyak tugas mekanik tidak perlu menunjukkan posisi masing-masing bagian tubuh. Jika ukuran tubuh kecil dibandingkan jarak ke badan lain, maka tubuh ini dapat dipertimbangkan poin Bahan.. Jadi ketika menggerakkan mobil jarak jauh, Anda dapat mengabaikannya lama, karena panjang mobil kecil dibandingkan jarak yang berlalu.
Ini intuitif bahwa karakteristik gerakan (kecepatan, lintasan, dll) tergantung pada di mana kita melihatnya. Oleh karena itu, konsep sistem referensi diperkenalkan untuk menggambarkan pergerakan. Sistem Referensi (CO) - Kombinasi dari badan referensi (dianggap benar-benar padat), terkait dengan sistem koordinat, penguasa (pengukuran perangkat), jam dan sinkronisasi waktu.
Bergerak dari waktu ke waktu dari satu titik ke titik lain, tubuh (titik material) menjelaskan dalam baris tertentu yang disebut lintasan pergerakan tubuh.
Perpindahan tubuh Mereka menyebut garis potong arah yang menghubungkan posisi awal tubuh dengan posisi akhir. Pindahkan ada besarnya vektor. Bergerak dapat meningkat dalam proses gerakan, berkurang dan menjadi nol.
Lulus cara sama dengan panjang lintasan yang dilalui oleh tubuh untuk sementara waktu. Jalan adalah nilai skalar. Jalan tidak dapat dikurangi. Jalur hanya meningkat tetap konstan (jika tubuh tidak bergerak). Ketika tubuh bergerak di sepanjang lintasan lengkung, modul (panjang) vektor gerakan selalu kurang dari jalur yang ditempuh.
Untuk seragam (pada kecepatan konstan) jalur gerakan L. Dapat ditemukan oleh formula:
dimana: v. - Kecepatan tubuh, t. - Waktu yang bergerak. Saat memecahkan tugas-tugas kinematika, gerakan ini biasanya terbuat dari pertimbangan geometris. Seringkali, pertimbangan geometris untuk lokasi langkah ini membutuhkan pengetahuan teorema pythagores.
kecepatan rata-rata
Kecepatan - Kuantitas vektor mengkarakterisasi kecepatan menggerakkan tubuh di ruang angkasa. Kecepatan sedang dan instan. Kecepatan instan menggambarkan pergerakan pada titik khusus ini dalam titik ruang khusus ini, dan kecepatan rata-rata mencirikan semua pergerakan secara keseluruhan, secara umum, tanpa menggambarkan detail pergerakan di setiap situs tertentu.
Jalur kecepatan rata-rata - Ini adalah rasio dari sepanjang masa pergerakan:

dimana: L. penuh - semua cara tubuh berlalu, t. Penuh - sepanjang waktu gerakan.
Kecepatan rata-rata gerakan - Ini adalah rasio semua gerakan ke sepanjang waktu gerakan:

Nilai ini diarahkan serta gerakan penuh tubuh (yaitu, dari titik awal gerakan ke titik akhir). Pada saat yang sama, jangan lupa bahwa gerakan lengkap tidak selalu sama dengan jumlah aljabar gerakan pada tahap gerakan tertentu. Vektor gerakan penuh sama dengan jumlah vektor gerakan pada tahap gerakan yang terpisah.
- Saat memecahkan masalah pada kinematika, jangan membuat kesalahan yang sangat umum. Kecepatan rata-rata biasanya tidak sama dengan kecepatan tubuh aritmatika rata-rata pada setiap tahap gerakan. Rata-rata aritmatika hanya diperoleh dalam beberapa kasus tertentu.
- Dan bahkan lebih, kecepatan rata-rata tidak sama dengan salah satu kecepatan yang bergerak tubuh selama pergerakan, bahkan jika kecepatan ini memiliki sekitar nilai perantara relatif terhadap kecepatan lain yang bergerak.
Sama diminta gerakan lurus
Percepatan - Kuantitas fisik vektor yang menentukan kecepatan mengubah tubuh tubuh. Akselerasi tubuh disebut rasio perubahan kecepatan pada periode di mana perubahan kecepatan terjadi:
![]()
dimana: v. 0 - kecepatan tubuh awal, v. - Kecepatan tubuh final (I.E. Setelah periode waktu tertentu t.).
Selanjutnya, kecuali dinyatakan lain dalam kondisi masalah, kami percaya bahwa jika tubuh bergerak dengan akselerasi, akselerasi ini tetap konstan. Gerakan tubuh seperti itu disebut sEMUA (atau sama). Dengan gerakan ekuilibrium, kecepatan tubuh bervariasi sesuai dengan nilai yang sama untuk periode waktu yang sama.
Gerakan yang diperagakan sama sebenarnya dipercepat ketika tubuh meningkatkan kecepatan, dan memperlambat ketika kecepatan berkurang. Untuk kesederhanaan, tugas-tugas nyaman untuk gerakan lambat untuk mengambil akselerasi dengan tanda "-".
Dari formula sebelumnya, formula lain yang lebih umum harus dijelaskan mengubah kecepatan dengan waktu Dengan gerakan keseimbangan:
Bergerak (tapi bukan jalannya) Pada gerakan menyamakan, rumus dihitung oleh formula:

![]()
Dalam formula terakhir, satu fitur gerakan setara digunakan. Dengan gerakan ekuilibrium, kecepatan rata-rata dapat dihitung sebagai rata-rata aritmatika dan kecepatan akhir (properti ini sangat nyaman digunakan saat menyelesaikan beberapa tugas):
Dengan perhitungan jalur semuanya lebih rumit. Jika tubuh tidak mengubah arah gerakan, maka dengan gerakan lurus yang diseimbangkan, jalurnya secara numerik sama dengan gerakan. Dan jika itu berubah - perlu untuk membaca jalur secara terpisah sebelum berhenti (memutar momen) dan jalur setelah berhenti (saat pembalikan). Dan hanyalah ketahanan waktu dalam rumus untuk bergerak dalam hal ini akan mengarah pada kesalahan khas.
Koordinat Pada gerakan keseimbangan, perubahan di bawah hukum:

Kecepatan proyeksi Dengan gerakan keseimbangan, itu berubah sesuai dengan hukum seperti itu:
![]()
Rumus serupa diperoleh untuk sumbu koordinat yang tersisa.
Drop gratis oleh vertikal
Pada semua tubuh di bidang tanah, kekuatan gravitasi bertindak. Dengan tidak adanya dukungan atau penangguhan, kekuatan ini menyebabkan tubuh jatuh ke permukaan bumi. Jika Anda mengabaikan resistansi udara, maka pergerakan tubuh hanya di bawah aksi gravitasi disebut drop gratis. Kekuatan gravitasi melaporkan ke badan apa pun, terlepas dari bentuk, massa dan ukurannya, akselerasi yang sama, disebut percepatan jatuh bebas. Dekat permukaan bumi akselerasi gravitasi Jumlah:
Ini berarti bahwa penurunan gratis di semua mayat di dekat permukaan bumi setara (tetapi belum tentu langsung). Pertama, pertimbangkan kasus paling sederhana dari jatuh bebas ketika tubuh bergerak secara ketat secara vertikal. Gerakan seperti itu adalah gerakan keseimbangan langsung, sehingga semua pola yang sebelumnya dipelajari dan fokus dari gerakan seperti itu cocok untuk jatuh bebas. Hanya akselerasi yang selalu sama dengan akselerasi jatuh bebas.
Secara tradisional, dengan jatuh bebas, sumbu OY yang diarahkan secara vertikal digunakan. Tidak ada yang mengerikan di sini. Hanya perlu di semua formula bukannya indeks " h."Menulis" w." Arti indeks ini dan aturan definisi tanda-tanda dipertahankan. Di mana untuk mengarahkan sumbu Oy - pilihan Anda tergantung pada kenyamanan memecahkan masalah. Opsi 2: naik atau turun.
Mari kita berikan beberapa rumus yang memecahkan beberapa tugas kinematika khusus untuk penurunan gratis secara vertikal. Misalnya, kecepatan dengan tubuh jatuh dari ketinggian jatuh h. Tanpa kecepatan awal:
Tubuh jatuh waktu dari ketinggian h. Tanpa kecepatan awal:

Tinggi maksimum yang akan naik, ditinggalkan secara vertikal pada kecepatan awal v. 0, waktu pengangkatan tubuh ini untuk ketinggian maksimum, dan waktu penerbangan penuh (sebelum kembali ke titik awal):
Lemparan horizontal.
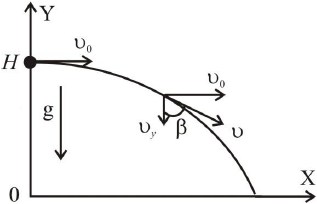
Dengan lemparan horizontal pada kecepatan awal v. 0 Pergerakan tubuh dengan mudah dianggap sebagai dua gerakan: seragam di sepanjang sumbu oh (sepanjang sumbu oh tidak ada kekuatan menghambat atau membantu gerakan) dan gerakan kesetimbangan di sepanjang sumbu Oy.
Kecepatan kapan saja diarahkan oleh lintasan. Ini dapat didekomposisi menjadi dua komponen: horizontal dan vertikal. Komponen horizontal selalu tetap tidak berubah dan sama v. x \u003d. v. 0. Dan vertikal meningkat sesuai dengan hukum gerakan yang dipercepat v. y \u003d. gt.. Di mana kecepatan tubuh penuh Dapat ditemukan oleh formula:
![]()
![]()
Penting untuk dipahami bahwa waktu penurunan tubuh ke tanah tidak tergantung pada kecepatan horizontal apa yang dilemparkan, tetapi hanya ditentukan oleh tingginya dengan tubuh dilemparkan. Waktu jatuh tubuh ke tanah adalah dengan formula:

Sementara tubuh turun, secara bersamaan bergerak di sepanjang sumbu horizontal. Karenanya, rentang penerbangan tubuh atau jarak yang bisa terbang di sepanjang sumbu oh, akan sama dengan:
Sudut masing-masing cakrawala dan kecepatan tubuh mudah ditemukan dari rasio:

Kadang-kadang kadang-kadang dalam tugas dapat bertanya tentang waktu di mana kecepatan tubuh penuh akan dimiringkan pada sudut tertentu vertikal. Maka sudut ini akan dari rasio:

Penting untuk memahami sudut mana yang muncul dalam tugas (dengan vertikal atau horizontal). Ini akan membantu Anda memilih formula yang tepat. Jika Anda mengatasi masalah ini dengan metode koordinat, maka formula umum untuk hukum perubahan dalam koordinat dengan gerakan keseimbangan:
![]()
Itu dikonversi ke hukum pergerakan berikutnya sepanjang sumbu Oy untuk tubuh horizontal yang ditinggalkan:
Dengan bantuannya, kita dapat menemukan ketinggian di mana tubuh akan berlokasi kapan saja. Pada saat yang sama, pada saat tubuh jatuh ke Bumi Koordinat tubuh di sepanjang sumbu Oy akan menjadi nol. Jelas, di sepanjang sumbu oh, tubuh bergerak secara merata, oleh karena itu, dalam metode koordinat, koordinat horizontal akan berubah oleh hukum:
Lempar sudut ke cakrawala (dari tanah ke bumi)
Tinggi pengangkatan maksimum saat melempar pada sudut ke cakrawala (relatif terhadap level awal):

Mengangkat waktu ke ketinggian maksimum saat melempar pada sudut ke cakrawala:

Jangkauan penerbangan dan penuh waktu tubuh tubuh ditinggalkan pada sudut ke cakrawala (asalkan penerbangan berakhir pada ketinggian yang sama dengan tubuh dilemparkan, misalnya, dari tanah ke bumi):

Tingkat tubuh minimum tubuh yang ditinggalkan pada sudut ke cakrawala berada di titik tertinggi mengangkat, dan sama dengan:
Tingkat tubuh maksimum yang ditinggalkan pada sudut ke cakrawala adalah pada saat-saat melempar dan jatuh ke tanah, dan sama dengan yang pertama. Pernyataan ini benar hanya untuk melempar dari bumi ke bumi. Jika tubuh terus terbang di bawah level dari mana itu dilemparkan, itu akan ada di sana untuk memperoleh kecepatan yang meningkat dan lebih banyak.
Penambahan kecepatan
Gerakan Tel dapat dijelaskan dalam berbagai sistem referensi. Dari sudut pandang kinematika, semua sistem referensi sama. Namun, karakteristik gerak kinematik, seperti lintasan, bergerak, kecepatan, berbeda dalam sistem yang berbeda. Nilai-nilai tergantung pada pilihan sistem referensi di mana pengukuran mereka dibuat disebut relatif. Dengan demikian, perdamaian dan pergerakan tubuh relatif.
Dengan demikian, tingkat tubuh absolut sama dengan jumlah vektor kecepatannya relatif terhadap sistem koordinat bergerak dan kecepatan sistem referensi seluler itu sendiri. Atau, dengan kata lain, kecepatan tubuh dalam sistem referensi tetap sama dengan jumlah vektor kecepatan tubuh dalam sistem referensi bergerak dan kecepatan sistem referensi bergerak relatif tetap.
Gerakan seragam di sekitar lingkaran
Gerakan tubuh di sekitar lingkar adalah kasus khusus dari gerakan curvilinear. Jenis gerakan ini juga dipertimbangkan dalam kinematika. Dengan gerakan melengkung, vektor kecepatan tubuh selalu ditujukan pada garis singgung ke lintasan. Hal yang sama terjadi ketika mengemudi di sekitar lingkaran (lihat gambar). Gerakan tubuh yang seragam di sekitar lingkaran ditandai dengan sejumlah nilai.

Titik - Waktu yang tubuh, bergerak di sekitar lingkaran, membuat satu putaran penuh. Unit pengukuran - 1 detik. Periode dihitung oleh rumus:
Frekuensi - Jumlah revolusi yang membuat tubuh dengan bergerak di sekitar keliling, per unit waktu. Unit Pengukuran - 1 Rev / s atau 1 Hz. Frekuensi dihitung oleh rumus:
Dalam kedua formula: N. - Jumlah revolusi selama ini t.. Seperti yang dapat dilihat dari formula di atas, periode dan frekuensi besarnya interpretasi:
![]()
Untuk kecepatan rotasi seragam Tubuh akan didefinisikan sebagai berikut:
![]()
dimana: l. - Panjang lingkaran atau jalur yang dilewati oleh tubuh selama periode yang sama T.. Ketika tubuh bergerak di sekitar lingkaran, lebih mudah untuk mempertimbangkan gerakan sudut φ (atau sudut rotasi), diukur dalam radian. Kecepatan sudut ω Tubuh pada titik ini disebut rasio gerakan sudut kecil δ φ untuk jangka waktu kecil δ t.. Jelas, selama periode yang sama T. Tubuh akan melewati sudut sama dengan 2 π Oleh karena itu, dengan gerakan seragam di sekitar lingkaran, formula dilakukan:
![]()
Kecepatan sudut diukur dalam rad / s. Jangan lupa untuk mentransfer sudut dari derajat ke radian. DouGie Panjang l. Terkait dengan sudut rotasi dengan rasio:
Komunikasi antara modul kecepatan linier v. dan kecepatan sudut ω :
![]()
Ketika tubuh bergerak di sekitar lingkaran dengan modulo konstan, hanya arah perubahan vektor kecepatan, sehingga pergerakan tubuh di sekitar keliling dengan kecepatan konstan dengan kecepatan adalah gerakan dengan akselerasi (tetapi tidak sama dengan),, karena arah perubahan kecepatan. Dalam hal ini, akselerasi diarahkan sepanjang jari-jari ke tengah lingkaran. Ini disebut normal, atau akselerasi Centripetal.Karena vektor akselerasi pada titik mana pun dari lingkaran diarahkan ke pusatnya (lihat gambar).

Modul Akselerasi Centripetal Linier dikaitkan v di situs ini. Untuk ini, Anda perlu sesuatu, yaitu, untuk mencurahkan persiapan untuk CT dalam fisika dan matematika, studi tentang teori dan memecahkan masalah tiga atau empat jam setiap hari. Faktanya adalah bahwa CT adalah ujian, di mana itu tidak cukup untuk mengetahui fisika atau matematika, Anda harus dapat dengan cepat dan tanpa kegagalan untuk menyelesaikan sejumlah besar tugas pada berbagai topik dan berbagai kompleksitas. Anda hanya dapat belajar bagaimana menyelesaikan ribuan tugas.
Implementasi yang berhasil, rajin, dan bertanggung jawab atas ketiga item ini, serta studi yang bertanggung jawab atas tes pelatihan akhir, akan memungkinkan Anda untuk menunjukkan hasil yang bagus pada CT, maksimum apa yang Anda mampu.
Menemukan kesalahan?
Jika Anda pikir Anda tampaknya memiliki kesalahan dalam materi pelatihan, silakan tulis tentang itu melalui email (). Dalam surat itu, tentukan subjek (fisika atau matematika), nama atau nomor topik atau tes, nomor tugas, atau tempat dalam teks (halaman) di mana Anda berpikir ada kesalahan. Juga jelaskan apa kesalahan estimasi. Surat Anda tidak akan tetap tanpa disadari, kesalahan baik akan diperbaiki, atau Anda akan menjelaskan mengapa ini bukan kesalahan.